
Toward Micromechanical Flyers
RONALD S. FEARING
Department of Electrical Engineering and Computer Sciences
University of California, Berkeley
In this paper I describe some of the microflyers being developed around the world and the engineering challenges they present. Advances in the late 1980s in microelectromechanical systems (MEMS), especially the surface micromachined electrostatic micromotor of Fan et al. (1988), inspired roboticists to think small. In 1987, Flynn proposed building inexpensive, disposable, autonomous milligram (mg)-mass microrobots that could be deployed in massive swarms. In my back-of-the-envelope calculations, the cost per unit would be $1.00 to $10.00, perhaps two to three orders of magnitude cheaper than conventional trash-can-size mobile robots. In this new paradigm, huge numbers of moderately intelligent and robust microrobots could perform tasks, such as searching an area, more effectively than a single expensive macrorobot.
Research on mobile microrobots is being done on legged devices (Eberfors et al., 1999; Yeh et al., 1996) and flying devices (Crary et al., 1992; Shimoyama et al., 1994). Legged devices can be made statically stable, and hence easy to control, but path planning can be difficult for an ant-sized device with six 5-millimeter (mm)-high legs. Flying devices have much more difficult power and control requirements, but avoiding obstacles while flying around a room seems easier than negotiating a shag carpet with six 5-mm-high legs.
For high speed, flying is the way to go. Small flying insects, such as the hoverfly, can reach peak speeds of 10 meters per second (about 1,000 body lengths per second). Rotary or flapping wings provide hovering capability but drastically increase power requirements. For example, the flyer reported in Flynn (1987) was a fixed-wing device with a 12-centimeter wingspan that weighed 80 mg. The device required only 5 watts per kilogram (W/kg) to fly using a propeller without flapping its wings. (It should be noted that this device was
powered by a rubber band and had no control electronics.) By comparison, flapping flyers require 100 to 200 W/kg. The extra power of flapping flight greatly improves maneuverability.
Perhaps surprisingly, small, subcentimeter flyers may turn out to be easier to construct than larger flyers, not because the aerodynamics are easier, but because the actuator power density increases with higher operating frequencies. In addition, the surface area-to-volume ratio improves for small devices. Thus, small flyers might be driven by solar cells. With piezoelectric actuators running in resonance at the wing beat frequency, power density is proportional to frequency. In addition, at smaller scales, one can generally avoid conventional joints and bearings, which are heavy, and use flexural joints, which are lighter and scale down well in size.
Designing a micromechanical flyer, a device with maximum dimensions of 25 mm and a mass of 100 mg, for example, is a challenge on many fronts— aerodynamics, actuation, transmission, power supply, sensing, control algorithms, compact low-power electronics, and flight behavior. As far as I know, no flyer smaller than the Caltech microbat has flown freely. Only the 10-gram Caltech microbat ornithopter (Figure 1) has flown under its own power with passive stabilization.
ORNITHOPTER MICROAIR VEHICLES
Several groups, notably Caltech, SRI, and Vanderbilt, have developed components for small bird-size ornithopters. Interestingly, all of these designs use only 1 degree of freedom wings and rely on passive or coupling mechanisms to control wing rotation. The Caltech design (Figure 1) uses a standard direct

FIGURE 1 Caltech microbat. Source: Reprinted with permission from Elsevier Science (Pornsin-Sirirak et al., 2001).
current (DC) motor and gear box. The SRI device uses electrostrictive polymer actuators (Figure 2). The Vanderbilt device uses piezoelectric actuators (Figure 3).
ROTARY AND FLAPPING WING MICROFLYERS
Based on our macroscale experience, we assume that a rotary wing device with fixed angle of attack would be easier to fabricate than a beating wing device. We are right—to a point. The assumption doesn’t hold up, however, when we reach the lower limit of magnetic motor size, which is currently 1.9-mm diameter, 5.5-mm length, and 91-mg mass (Faulhaber Group, 2001). Mock-ups of helicopters using these motors have been constructed by Institut für

FIGURE 2 SRI flapper. Source: Reprinted with permission from SRI International (SRI, 2001).
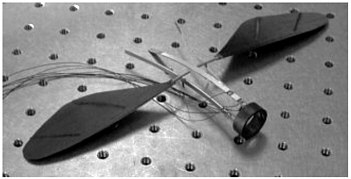
FIGURE 3 Vanderbilt University mesoscale flying robot. Source: Reprinted with permission from The American Society of Mechanical Engineers (Cox et al., 1999).
Mikroteknik Mainz in Germany (Figure 4a) and Stanford University (Figure 4b). Keeping the mass of the device under 100 mg will require more compact actuators. I expect that shrinking bearings further to create an efficient, high energy density, submillimeter magnetic motor will be difficult. Thus, in terms of miniaturization, one is encouraged to think of beating wings rather than rotary wings. Flapping wings can change the direction of applied torques in a wing beat, potentially improving maneuverability. A mock-up of the Berkeley micromechanical flying insect (MFI) is shown in Figure 5.
AERODYNAMICS
As a design target for the MFI, we chose the blowfly (Calliphora), which has a mass of 100 mg, a wing length of 11 mm, a wing beat frequency of 150 Hz, and actuator power of about 8 milliwatts (mW). At this size scale, our current

FIGURE 4(a) Institut für Mikroteknik Mainz’s uncontrolled helicopter, length 24 mm, mass 0.4 grams. Source: Reprinted with permission from the Institut für Mikroteknik Mainz (IMM, 2001). (b). Mockup of the Stanford Mesicopter with four 1.5-cm rotors and a mass of 3 grams. Source: Reprinted with permission from Ilan Kroo (Department of Aeronautics and Astronautics, Stanford University, 2001).

FIGURE 5 Mock-up of the Berkeley micromechanical flying insect (wingspan 25 mm and final mass target 100 mg).
understanding of nonsteady-state aerodynamics comes from experimental observations of real insects and kinematically similar mock-ups (Dickinson et al., 1999; Ellington et al., 1996).
The Robofly apparatus (Dickinson et al., 1999) consists of a two-winged system driven by three stepping motors, which can closely mimic the stroke kinematics of a fruit fly (Drosophila) or other arbitrary kinematics. Strain gauges are used to measure instantaneous wing forces, and the integral of forces around a closed wing beat cycle can be measured to determine net flight forces. Robofly running with a wing beat of 1/6 Hz in oil has the same Reynolds number as a Drosophila with a wing beat of 220 Hz in air. Flow was visualized using air bubbles in the oil tank and particle image velocimetry.
The Robofly apparatus has enabled Dickinson and colleagues to identify the three key aerodynamic mechanisms used by insects: delayed stall and wake capture (Figure 6) and rotational circulation (Figure 7). Dickinson et al. (1999) found wing trajectories that generate peak lift forces of four times the equivalent insect weight. Due to rotational lift, the timing of an equivalent of a backspin motion at the bottom of the wing stroke can change the net lift from positive to negative. The second key mechanism is the significant force generated by wake capture at the top and bottom of the wing stroke. Applying these results to the wing kinematics of the MFI, we realized that a rapid wing rotation of 90 degrees is necessary before the end of the downstroke to create adequate lift.

FIGURE 6 Delayed stall and wake capture effects. Source: Reprinted with permission from Bryan Christie (Dickinson, 2001).
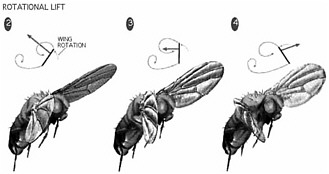
FIGURE 7 Lift due to wing rotation and ends of stroke. Source: Reprinted with permission from Bryan Christie (Dickinson, 2001).
THORAX DESIGN
We know that insect flight at the centimeter scale requires both large stroke amplitude and large wing rotation (Dickinson et al., 1999). Drosophila has a wing stroke of 160 degrees combined with wing rotation of more than 90 degrees (Calliphora has similar kinematics). Wing rotation is the challenging part of the design. The insect thorax has a complicated arrangement of linkages and cams, which is not yet fully understood and is likely to be too difficult to replicate (Nachtigall et al., 1998). The electromechanical design of the thorax poses some interesting challenges. The actuators combined with the wing transmission
should weigh less than 50 mg and provide 10 mW of mechanical power to a wing being driven in flapping and rotation at 150 Hz with large amplitudes.
For actuators, we use piezoelectric unimorphs, which have a DC displacement of about 1 degree. Two stages of mechanical amplification using planar fourbars bring the output motion at DC to 50 degrees. Separate actuators drive the leading and trailing edges of a differential assembly, as shown in Figure 8a,b. The thorax is designed to be run in resonance with a quality factor (Q) of 2.5. A higher Q would reduce the response speed of the wing to controlling rotation; a lower Q would require an even higher transmission ratio. It turns out that even a very low wing inertia is not sufficient for proper operation; wing inertia ratios must be chosen for dynamic decoupling of the differential. The overall thorax

FIGURE 8(a) MFI thorax for driving one wing consisting of a pair of fourbars driving a wing differential mechanism, OACB. (b) Detail of compact, low-inertia, wing differential. Source: Reprinted with permission from Yan et al., 2000. Copyright 2001 by IEEE.
kinematics is a closed chain manipulator with 17 joints and 2 degrees of freedom. For light weight and strength, the structure is assembled from 12.7 micron stainless steel sheet folded into hollow beams with polyester flexure joints between links.
SUMMARY
Research on micromechanical flyers has led to an understanding of how to generate high-frequency, high-amplitude wing motions in a low-mass, compact device. The challenges ahead will be to integrate sensing and control devices into this inherently very unstable, but potentially high-performance, flying device. Taking our inspiration from real insects and our tools from MEMS, we will work on integrating optical flow and gyroscopic sensing on the MFI to control attitude and bring the device closer to its first free flight.
ACKNOWLEDGMENTS
The Berkeley MFI research summarized here is supported by the Office of Naval Research, DARPA, and the National Science Foundation. The contributions of the interdisciplinary MFI research team are gratefully acknowledged.
REFERENCES
Cox, A., D.J. Monopoli, and M. Goldfarb. 1999. Development of piezoelectrically actuated elastodynamic flapping micro-aerial vehicles. Pp. 257–262 in ASME International Mechanical Engineering Congress and Exhibition. AD-Vol. 59/MD-Vol. 87 Adaptive Structures and Materials Systems. New York: ASME.
Crary, S.B., G.K. Ananthasuresh, and S. Kota. 1992. Prospects for microflight using micromechanisms. Pp. 273–276 in Proceedings of the International Symposium on Theory of Machines and Mechanisms, International Federation of Theory of Machines and Mechanisms-Japan Council, Nagoya, Japan, September 24–26, 1992.
Dickinson, M. 2001. Solving the mysteries of insect flight. Scientific American 284(6):49–57.
Dickinson, M.H., F.-O. Lehmann, and S.P. Sane. 1999. Wing rotation and the aerodynamic basis of insect flight. Science 284(5422):1954–1960.
Eberfors, T., J. Mattson, E. Kalvesten, and G. Stemme. 1999. A walking silicon micro-robot. Pp. 1202–1205 in 10th International Conference on Solid-State Sensors and Actuators (TRANSDUCERS ‘99). New York: Elsevier.
Ellington, C.P., C. van den Berg, A.P. Willmot, and A.L.R. Thomas. 1996. Leading edge vortices in insect flight. Nature 384:626–630.
Fan, L.-S., Y.-C. Tai, and R.S. Muller. 1988. IC-processed electrostatic micro-motors. Pp. 666–669 in Proceedings of the International Electron Devices Meeting. New York: IEEE.
Faulhaber Group. 2001. Mensch and Technik. Available online at <http://www.faulhaber.de>.
Flynn, A.M. 1987. Gnat robots (and how they will change robotics). Pp. 221–225 in Proceedings of the IEEE MicroRobots and Teleoperators Workshop. New York: IEEE.
IMM (Institut für Mikroteknik Mainz). 2001. Available online at <http://www.imm-mainz.de/images/crhubi.gif>.
Nachtigall, W., A. Wisser, and D. Eisinger. 1998. Flight of the honey bee. VIII. Functional elements and mechanics of the ‘flight motor’ and the wing joint—one of the most complicated gear-mechanisms in the animal kingdom. Journal of Comparative Physiology B 168:323–344.
Pornsin-Sirirak, T.N., Y.-C. Tai, H. Nassef, and C.M. Ho. 2001. Titanium-alloy MEMS wing technology for a micro aerial vehicle application. Sensors and Actuators, A: Physical 89(1–2):95–103.
Shimoyama, I., Y. Kubo, T. Kaneda, and H. Miura. 1994. Simple microflight mechanism on silicon wafer. Pp. 148–152 in Proceedings of the IEEE Micro Electro Mechanical Systems. New York: IEEE.
SRI (SRI International). 2001. Artificial Muscle Transducers. Available online at <http://www.erg.sri.com/automation/actuators.html>.
Stanford University. 2001. Mesicopter Image Gallery. Available online at <http://adg.stanford.edu/mesicopter/imageArchive/>.
Yan, J., R.J. Wood, S. Avadhanula, D. Campolo, M. Sitti, and R.S. Fearing. 2001. Towards flapping wing control for a micromechanical flying insect. Pp. 3901–3908 in Proceedings of the IEEE International Conference on Robotics and Automation. Piscataway, N.J.: IEEE.
Yeh, R., E.J.J. Kruglick, and K.S.J. Pister. 1996. Surface-micromachined components for articulated microrobots. Journal of Microelectromechanical Systems 5(1):10–17.
SUGGESTED ADDITIONAL READINGS
Miki, N., and I. Shimoyama. 1998. Study on micro-flying robots. Advanced Robotics 13(3):245–246.
Ramamurti, R., and W.C. Sandberg. 2001. Computational study of 3D flapping foil flows. Presented at the 39th AIAA Aerospace Sciences Meeting, AIAA-2001-0605, Reno, Nevada, January 8–11, 2001.
Wang, Z.J. 2000. Two dimensional mechanisms for insect hovering. Physical Review Letters 85(10):2216–2219.











{kind=link}