
The Interchangeability Problem: Signals, Coordinate Frames, and Time
RITA M. LOLLOCK and THOMAS D. POWELL
The Aerospace Corporation
THOMAS A. STANSELL
Stansell Consulting
INTRODUCTION
The Global Positioning System (GPS) and the GLObal NAvigation Satellite System (GLONASS) were developed independently. Although similar in certain respects (e.g., constellation design and dual L-band frequencies), there was no intent by the developers to make the systems interoperable. The first known receiver to use both GPS and GLONASS signals for navigation was a prototype developed by Magnavox and delivered to Lincoln Laboratory in 1990. To achieve satisfactory navigation results the receiver had to compensate for differences in system time, coordinate frame, signal frequencies, spreading codes, message formats, and separate filter delays within the receiver. Nevertheless, this and subsequent commercial receivers were able to demonstrate that two rather dissimilar systems could be used together to achieve better results than with either system alone, especially in difficult reception environments, even though the systems were far from “interchangeable.”
In recent years new systems have been proposed and are being developed, including Compass, Galileo, and QZSS (Quasi-Zenith Satellite System). Also, both GPS and GLONASS are being modernized with new signals. These systems are now referred to collectively as Global Navigation Satellite Systems, or GNSS. Fortunately, the international climate has changed substantially such that “compatibility” and “interoperability” are important topics at multilateral meetings such as the International Telecommunication Union (ITU) and the International Committee on GNSS (ICG) as well as at bilateral meetings between system providers. Compatibility between systems is vital to ensure that signals from one system
do not unacceptably degrade the performance of other systems. Primarily this means that compatible systems must provide signals with similar maximum and minimum received power levels.
The internationally accepted definition of interoperability is the “ability of open global and regional satellite navigation and timing services to be used together to provide better capabilities at the user level than would be achieved by relying solely on one service or signal.” As a result of international cooperation, new and modernized GNSS signals will have characteristics that substantially improve interoperability as compared with the original GPS and GLONASS signals.
Some have suggested that the goal should be not only interoperability but also interchangeability, meaning that there should be no discernible differences between the signals from different systems. This paper addresses the problems of achieving full interchangeability of signals while also showing why the remaining differences will not affect users.
IDEAL INTERCHANGEABILITY
It is instructive to realize that the current GPS constellation is populated with four different types of satellites with four significantly different designs from different manufacturers, as shown in Figure 1. These are the GPS Block IIA satellites built by Rockwell International (now Boeing), the GPS Block IIR and the Block IIR-M satellites built by Lockheed Martin, and the GPS Block IIF satellites built by Boeing. Later in this decade a fifth type of satellite, the GPS Block III being designed by
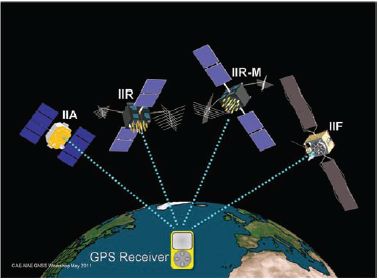
FIGURE 1 GPS receivers track four different satellite types.
Lockheed Martin, will join the constellation. The Block IIR-M added three new signals, the Block IIF added a fourth, and the Block III will add a fifth.
From a current user’s perspective, signals from different types of GPS satellites are completely interchangeable. This is because “backward compatibility” is required for each new type of satellite. Each legacy signal shares a common signal structure and the same orbit message parameters, geodesy, tracking stations, and GPS time. They are part of a unified system.
This type of interchangeability is not practical for other global navigation satellite systems. Each of these systems is separately owned, developed, and operated. They employ different signal structures, message formats, orbit characteristics, geodesy, tracking networks, control system software, and system time. Therefore, different GNSS signals are not inherently interchangeable. This paper evaluates whether current international cooperation on interoperability will produce true interchangeability from the user perspective. In other words, will users experience differences between systems?
INTEROPERABILITY PROGRESS AND STATUS
As a result of international bilateral and multilateral meetings, the advantages of GNSS interoperability have been recognized and major strides made toward achieving the goal. A particularly important achievement is that right hand circular polarization, code division multiple access (CDMA) modulation, and two identical GNSS carrier frequencies—1176.45 MHz and 1575.42 MHz—have been adopted by GPS, Compass, Galileo, and QZSS. Figure 2 illustrates each GNSS
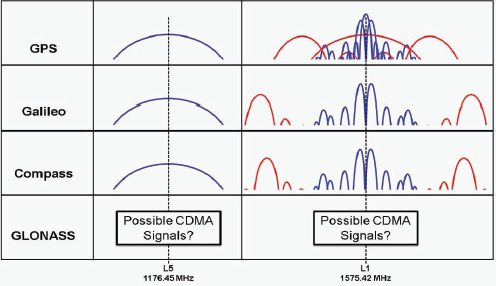
FIGURE 2 GNSS L1 and L5 signal plans.
provider’s signals centered on these two frequencies. GLONASS is considering these possibilities as well as other options that could provide the advantage of frequency diversity.
Differences in signal structure do exist, however. Some differences are because each constellation of satellites is different, and messages describing the orbits must be appropriate for each system. Beyond that, for example, the data rate on both the GPS L1C and L5 signals is 50 bits per second (bps) whereas the Galileo E1 OS data rate is 125 bps and the E5a data rate is 25 bps. GPS L1C employs a time multiplexed binary offset carrier (BOC) or TMBOC waveform, whereas the Galileo E1 OS employs a composite BOC (CBOC) waveform. The length of the GPS L1C spreading code is 10 ms or 10,230 chips, whereas the Galileo E1 OS spreading code length is 4 ms or 4,092 chips. Each signal has been developed to serve different objectives. In spite of these differences, interoperability is enhanced because of identical center frequencies and spectral characteristics.
However, users are not likely to notice any of these differences regardless of which combination of signals is being used at the moment. This is because user equipment is being designed to combine all types of signals to give one position, velocity, and time (PVT) solution. If different signals are known to have different levels of accuracy, they will be appropriately weighted in the combined solution. Users will not know or care about the “nationality” of the signals, but they will enjoy the benefits of improved availability and accuracy due to the larger number of signal sources, as shown by the “Multi-GNSS” receiver in Figure 3.
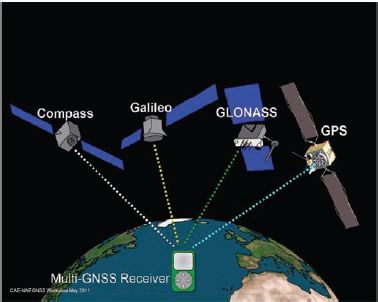
FIGURE 3 Transparent multi-GNSS interoperability is achievable through system and receiver design.
The key to understanding how user equipment will compensate for the signal differences is to recognize two classes of difference, i.e., analog and digital. Because of Moore’s law, the cost of digital electronics has continued to plummet while performance has greatly increased over previous decades, and the trend is expected to continue. On the other hand, dimensions of analog components such as antennas and filters are constrained by the fixed signal wavelength and have not experienced as much improvement. Therefore, it is important that signal characteristics that affect analog components be as common as possible. These include antenna polarization, center frequency, and waveform or spectrum. Fortunately, the standards for GPS, Compass, Galileo, and QZSS are right-hand circular polarization, 1575.42 MHz and 1176.45 MHz center frequencies, and a common signal spectrum at each center frequency. This allows use of common analog receiver components for each of these signals.
All other signal differences, such as the spreading codes, data rates, message structures, etc., are handled by digital electronics and software. It is not that these differences are unimportant, because receiver designers must accommodate each one, but the differences are invisible to the user because they are hidden within a special-purpose digital chip and internal software. Because digital chips and memory have become so cheap and so competent, a receiver using signals from all GNSS providers will cost no more than a receiver using signals from only one. In fact, because competition will drive every manufacturer to offer the best possible performance and features, it is likely that Multi-GNSS receivers will become the norm in the future.
SYSTEM TIME AND GEODETIC COORDINATE SYSTEMS
Concern has been expressed about how to achieve a common time standard and common spatial coordinate systems. There are two very effective approaches to resolving these issues.
First, time differences can be resolved by software in individual receivers. This was demonstrated in 1990 by the first GPS/GLONASS navigation receiver. System time differences are calibrated very precisely by including a time offset parameter in the navigation solution matrix. In other words, instead of solving for three position coordinates plus a receiver time offset by observing four or more signals from one system, it is straightforward to additionally solve for a system time offset by observing five or more signals from two systems. Some think this effectively removes one satellite from the observation matrix. However, that is an oversimplification. Because the time difference between two systems changes very slowly, the fifth variable can be determined quickly and then highly filtered. Once established and change is constrained, every satellite signal is able to participate in the navigation solution. The system time difference calibration can also be remembered and used immediately when a receiver is next switched on.
The difference between geodetic coordinate frames can be established very precisely by a network of receivers tracking signals from each system. The International GNSS Service (IGS) is an excellent example of this capability. Therefore, the offset between geodetic coordinate systems can be determined precisely and provided to user equipment in many ways. Some GNSS may choose to include coordinate offsets in their broadcast messages. These messages also will be provided over the Internet, transmitted by cell phone networks, or included as part of receiver software updates.
The other approach is for GNSS providers to operate with common time and geodetic standards. This is easier to achieve with the geodetic reference systems, because all providers consider the International Terrestrial Reference System (ITRS), which is established and updated by the IGS, to be the best available Earth representation. Therefore, every provider has moved their internal reference coordinate system ever closer to ITRS. As a result, most systems already agree or soon will agree with ITRS to within a few centimeters. Not only is this negligible for the vast majority of users, but also high-precision users employ differential corrections that eliminate the effect of any residual difference. Therefore, except for scientific geodesists, we can consider this problem solved.
System time differences are harder to resolve but easy to observe. Just as each user equipment can observe, solve for, and eliminate the effect of system time differences, networks can do the same. This ability would be enhanced by the interoperability agreements. With identical center frequencies and signal spectra, reference stations can precisely measure the time offset between satellites of different systems. Although providers could use this information to drive their own system clocks to agree with any one of the other systems, it would be preferable to establish an international GNSS time standard against which each system could measure its time and drive any difference toward zero.
Measured time differences can be communicated to user equipment in many ways. They could be included as part of the satellite message or provided by the Internet or over cell phone communications. Provisions already have been made for some systems to provide time offsets relative to one or more other systems. Multiple systems have announced initial plans to use GPS Time for this purpose. Knowing the offset in advance will help users in locations with limited visibility to obtain a position fix quickly with a few signals from several different systems. However, it should be noted that once many signals can be tracked simultaneously, the user equipment will measure the time differences more precisely on its own.
SPECIFICATIONS AND STANDARDS
As stated above, manufacturers already are designing, if not shipping, receivers capable of combining signals from many GNSS. However, including a system is not possible until its signal characteristics are well understood. This requires early publication by each GNSS provider of accurate signal specifications. Manu-
facturers will guess at the specifications and provide for future software updates, but only with accurate signal specifications will use of a particular system be assured. There also should be a way for manufacturers to ask questions and receive prompt replies from the system providers.
System performance standards help manufacturers anticipate how best to combine signals. Ultimately, of course, signal combination algorithms will be optimized by practical measurements.
When signals are used for safety of life applications, it is particularly important for providers not only to define the signals and the expected performance standards but also to rapidly issue service notifications as is done by GPS Notice Advisories to Navstar Users (NANUs). For example, the International Civil Aviation Organization (ICAO) requires specific service commitments and ongoing support before a GNSS can be accepted for use.
SUMMARY AND CONCLUSIONS
GPS was declared fully operational on April 27, 1995. More than 16 years later its performance continues to improve and the number of applications and users continues to expand exponentially. As phenomenal as this has been, GNSS is on the verge of revolutionary improvements as GPS signals complete their modernization, the GLONASS constellation completes its replenishment, and new systems such as Compass, Galileo, and QZSS become operational. In the future, when three GNSS frequencies become generally available, wide-area 10 cm phase-based navigation will proliferate.
Availability and accuracy for all forms of navigation will improve dramatically because the number of visible satellites will more than double. Figure 4 illustrates this for an environment with significant visibility obstructions, such as an urban canyon. Using only the five GPS satellites in view results in a position dilution of precision (PDOP) of 4.84. Adding the four Compass satellites in view improves the PDOP to 3.92. Adding the two Galileo satellites gives a PDOP of 2.37. With three GLONASS satellites, the PDOP becomes 2.16. The clear message of Figure 4 is that having many interoperable satellites will provide PNT availability even in difficult environments and with much better accuracy than possible with only one system.
International GNSS cooperation has improved dramatically so that users will experience the full benefits of interoperable signals. Because receivers will seamlessly combine signals with different digital characteristics, the user perception will be that all GNSS signals are fully interchangeable.
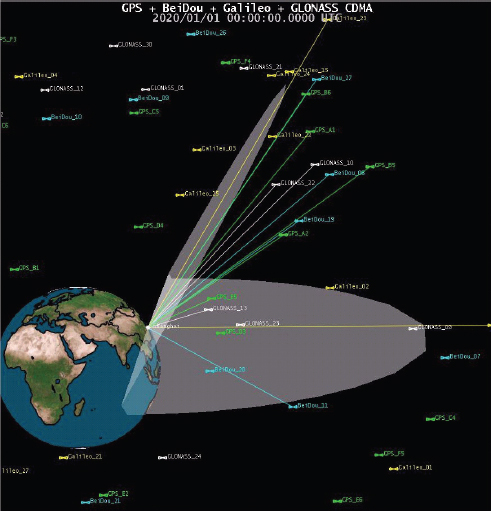
FIGURE 4 Better user accuracy is achievable via better position dilution of precision (PDOP) due to multi-GNSS interoperability.








