
5
Technology Development: Current Status and Future Direction
CubeSats have significantly evolved during the past decade, which could be expected of a disruptive innovation, described in Chapter 2. The science capabilities of CubeSats ultimately depend on their technological status. Due to their geometrical and mass constraints, CubeSats provide a unique innovation platform from which to rethink many engineering subsystems, especially in the context of modern developments in integrated sensors, as well as advances in computational and communications technologies. Such development may have important consequences beyond CubeSats for spacecraft of various sizes.1
Table 5.1 presents some of the CubeSat enabling technologies and examples of potential applications derived from Chapter 4’s discussion of each science discipline. For many disciplines, advancement in propulsion and high-bandwidth communications would be enabling. In particular, propulsion, which could enable significant new science applications, has rarely been used with CubeSats. Thermal control, as well as electrical power generation, storage, and management (although not listed for each discipline), are other challenging areas that are important for the continued evolution of CubeSats. See Table 5.2 for a brief overview of the status and capabilities of CubeSat technologies, from early CubeSats (past), to widely available and widely used systems (available), to capabilities on the cusp of development or that may not yet be widely available (emerging).
Many highly capable CubeSat technologies are under development, and as is common in rapidly evolving fields, notable gaps sometimes exist between flight-proven technologies and claimed performance levels. Moreover, the fast pace of the technology development, highly engaged academic and commercial communities, and rapid and frequent flight opportunities allow closing of technology gaps at a much quicker pace than elsewhere in the space sector.
COMMERCIAL PLAYERS AND THEIR RELEVANCE TO SCIENCE AND TECHNOLOGY DEVELOPMENT
Private industry is an important stakeholder in the CubeSat ecosystem—one that the government and scientific community can leverage to promote its own cost-effectiveness. Figure 1.3 shows that 76 percent of CubeSats launched in 2014 were commercial, and many technology developments in the sector are either made or driven by commercial actors. Many of the companies active in the CubeSat sector, especially operators and launch providers,
___________________
1 As noted in previous chapters, more than three-quarters of publications related to CubeSats are in engineering and technology areas.
TABLE 5.1 CubeSat Enabling Technologies and Potential Applications for Each Science Discipline
| Science Discipline | Enabling Technology | Example Application |
|---|---|---|
| Solar and Space Physics | Propulsion | Constellation deployment and maintenance; formation flight |
| Sub-arcsecond attitude control | High-resolution solar imaging | |
| Communications | Missions beyond low Earth orbit | |
| Miniaturized field and plasma sensors | In situ measurements of upper atmosphere plasmas | |
| Earth Science and Applications from Space | Propulsion | Constellations for high-temporal-resolution observation and orbit maintenance |
| Miniaturized sensors | Stable, repeatable, and calibrated data sets | |
| Communications | High data rate | |
| Planetary Science | Propulsion | Orbit insertion |
| Communications | Direct-to-Earth communications | |
| Radiation-tolerant electronics | Enhanced survival in planetary magnetospheres; long-duration flight | |
| Deployables | Enhanced power generation beyond Mars | |
| Astronomy and Astrophysics | Propulsion | Constellations for interferometry; distributed apertures |
| Sub-arcsecond attitude control | High-resolution imaging | |
| Communications | High data rate | |
| Deployables | Increase aperture and thermal control | |
| Miniaturized sensors | Ultraviolet and X-ray imaging | |
| Biological and Physical Sciences in Space | Thermal control | Stable payload environment |
TABLE 5.2 Brief Overview of the Status and Capability of CubeSat Technology
| Subsystem | Past | Available | Emerging | Report Section |
|---|---|---|---|---|
| Attitude determination | ±10° | ±0.5 - 1° Electromagnets, Sun and Earth sensors | ±0.002 – 0.01° Star trackers | Attitude and Orbit Determination and Control, p. 60 |
| Attitude controla | ±10° Passive, magnetic system and hysteresis | ±0.5 - 5° Reaction wheels, with limited de-saturation | ±0.1° (± ~0.01° by 2017) Reaction wheels, de-saturate via propulsion systems | Attitude and Orbit Determination and Control, p. 60 |
| Orbit determination | Two Line Element tracking: low accuracy | 2-way ranging. Accurate to <2 km, and GPS: ~10 m in position and 1 m/s in velocity | 2-way Doppler ranging | Attitude and Orbit Determination and Control, p. 60 |
| Orbit control | None | Differential drag, limited maneuvering | Non-propulsive systems and low-capability propulsive systems | Orbit Determination and Control, p. 60 |
| Communicationsb | <9.6 kbps | ~1 Mbps | Up to 50 Mbps (100-600 Mbps by 2017) | Communication, p. 61 |
| Propulsionc | None | Cold gas and other simple systems | Chemical, Plasma, and Electrospray systems | Mobility and Propulsion, p. 62; Deorbit Control and Space Debris Mitigation, p. 101 |
| Subsystem | Past | Available | Emerging | Report Section |
|---|---|---|---|---|
| Electrical power generationd | Body mounted cells | Deployable solar arrays: ~50 W on a 3U | Deployable, sun-tracking solar arrays: >75 W on a 3U | Mobility and Propulsion, p. 62 |
| Electrical power storagee | <30 Whr | 30 - 160 Whr | >200 Whr | Mobility and Propulsion, p. 62 |
| Thermalf | Passive | Passive and electrical heaters | Passive heat-pipes, thermal louvers, deployable Sun shield; new active systems, e.g., micro-cryocoolers | Electrical Power, Energy Storage, and Thermal Control, p. 63 |
| Deployable systems | None | Solar arrays and UHF/VHF dipole antennas | Ka-band antennas, gossamer structures, and tethers | Deployable Systems, p. 64 |
| Softwareg | Patchwork of scripts and lack of standards | Migration custom processors to Linux-based systems. Easing testing | Real-Time Operating Systems, multitasking, priority based scheduling and dynamic management | Flight and Ground Systems Software, p. 68 |
| Data handling and storage | Consumer grade electronics | Multiple flight proven solutions with SRAM and Flash storage | Increases in reliability and performance, including radiation tolerance and mitigation | Data Handling, Processing, and Autonomy, p. 68 |
| Systems and constellations | Single, one-off platforms with occasional reflights | 2-3 science platforms, plus commercial constellations | Off the shelf platforms (Science constellations of 10+ and formation flying by 2017) | System Integration, Platforms, and Constellations, p. 69 |
| Ground segment | Based on systems derived or developed from within amateur community who can offer significant support. Inter-satellite links have flown. Operational costs can be a driver. | CubeSat Communication, p. 75; Tracking Technology Options, p. 101 | ||
| Launch | Ease of integration a key enabler. Dispenser a well-established standard isolating from launch vehicle. Emerging small satellite launchers and even CubeSat-focused launch vehicles. | Launch as a Choke Point, p. 80; Integration with Launch Vehicle, p. 103 | ||
a Further improvement challenging without propulsion systems.
b Significant improvement enabled by improved attitude control. Moving from UHF/VHF through S and X-band, to Ka-band and low-power optical systems.
c Perhaps the least mature of the traditional sub-systems. Limited options due to volume and launch restrictions.
d More power can be generated on larger spacecraft (i.e., 6 or 12U, due to larger surface areas).
e Storage capabilities broadly tracking terrestrial capabilities using Lithium-ion and -polymer battery technology.
f Already an issue for certain science missions. As power density increases, thermal control will likely become an increasing challenge.
g Lags hardware development.
NOTE: A listing of capabilities, from early CubeSats (past) to widely available and widely used systems (available). Capabilities at the cusp of development or that may not yet be widely available (emerging) are also shown, along with technologies likely to be flown and demonstrated by 2017. The table notes in what sections detailed information can be found.
are relatively new. A sign that these emerging players are an important element of the CubeSat ecosystem is the fact that all five of the winners of the first milestone of NASA’s Cube Quest Challenge are entrepreneurial entities within universities or relatively unknown companies in the aerospace sector.2
Currently, most CubeSat companies are headquartered in the United States, although the sector has global participation. Spire, for example, has locations in the United States, the United Kingdom, and Singapore. Although it is not possible to separate CubeSat companies from small satellite companies, conference attendance statistics show that the dominant presence of both is from the United States. Nearly 600 companies were represented at the 2013 SmallSat Conference in Utah, of which approximately 75 percent were from the United States. However, as evidenced in the SmallSat conference, global participation is increasing. A review of participation statistics in the past 2 years shows that, excluding the United States, countries with the most industry presence are Japan and in Europe, in particular the United Kingdom, the Netherlands, and Sweden. In 2015, companies from 13 countries were represented that had not attended in 2014.
The commercial CubeSat sector is composed of a number of segments, such as the following:
- Firms that focus on hardware and software manufacturing and development, including manufacture of components. Current examples include both established and newer firms such as Blue Canyon Technologies, Black Swift Technologies, Maryland Aerospace Inc., Pumpkin Inc., SSBV Aerospace and Technology Group, Sinclair Interplanetary, Tyvak Nano-Satellite Systems Inc., and Tethers Unlimited, Inc., in the United States and Clyde Space, Gomspace, and Innovative Solutions in Space in Europe.
- Firms that focus primarily on operations and data services. Examples include Canopus Systems LLC, Planet Labs, Spire, and Terran Orbital, who operate CubeSats alongside larger but still small spacecraft. Planet Labs, for example, covers the entirety of the supply chain and manufactures its CubeSats, operates them, and sells imagery.
- CubeSat-enabled companies that focus exclusively on downstream activities, such as image analysis (examples include Mapbox, Orbital Analysis, and Windward), and use emerging techniques in big data (e.g., deep learning) to analyze the petabyte-sized data sets to which CubeSat data are added.
- An emerging set of launch providers, often not exclusively focused on CubeSats, includes both brokers—such as Spaceflight Industries, Tyvak, and Innovative Solutions in Space in Europe, that connect developers with launchers—as well as launch providers such as SpaceX, new launch systems like Virgin Galactic’s LauncherOne, or emerging small launcher companies like Rocket Labs. Of the 24 or so companies that can launch CubeSats as primary and secondary payloads, fewer than 20 percent focus on CubeSats alone.
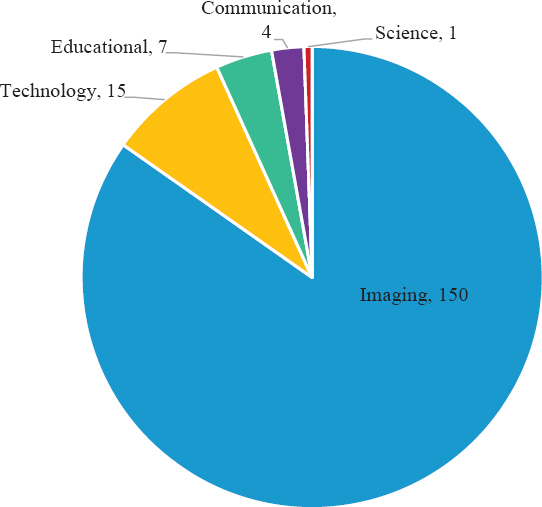
Most commercial CubeSats, and hence the companies operating them, are engaged in remote sensing and Earth observation and technology demonstrations. Of the total commercial CubeSats (177 out of the 425 total CubeSats launched since 2000), the vast majority are related to imaging (Figure 5.1). It is worth noting that most of the 177 were launched in the past 2 years, and 150 were imaging satellites launched by Planet Labs. Planet Labs plans to launch 250 CubeSats in 2016.
The sources of funds for CubeSat companies are varied and not generally publicly available or tracked. For example, Planet Labs has raised almost $200 million in venture capital, while Spire has raised $66.5 million.3 Companies like Accion Systems and Phase Four, that are developing propulsion systems for CubeSats, have also been funded all or in part by angel or venture funds. Many companies find the United States to be an ideal location because of the better funding environment. For example, New Zealand’s Rocket Labs has moved its headquarters to the United States for better access to investments and experienced partners. That said, companies in other
___________________
2 NASA’s Cube Quest is a competition to build flight-qualified, small satellites capable of advanced communication and propulsion near and beyond the Moon. Teams that achieve top performance at high-speed data communications, navigation, and survival after achieving lunar orbit or a minimum long-distance range from Earth compete for an unprecedented $5.5 million prize purse in NASA’s first ever in-space challenge. Cube Quest is part of NASA’s Centennial Challenges Program, which accelerates technology by engaging nontraditional sources in competition (see http://www.nasa.gov/directorates/spacetech/centennial_challenges/cubequest/nasa-awards-first-round-prizes-in-cube-quest-challenge.html).
3 CrunchBase, “Spire,” https://www.crunchbase.com/organization/nanosatisfi#/entity, accessed April 7, 2016.
countries are also able to raise venture funds, such as Lithuania’s NanoAvionics, a seed stage company in Europe that has raised €200,000.4
Overall, with only very few exceptions, these companies have emerged outside of the mainstream aerospace community, which is consistent with the conclusion above that CubeSats are a disruptive innovation (see Chapter 2). Like other disruptive innovations, CubeSats use deeply entrepreneurial paradigms and funding mechanisms and new, often exploratory business models, making CubeSats a low-cost way to collect space-based data of commercial interest.
Impact of Industry on Science-Based Missions
The increasing number of commercial CubeSats and other small satellites in development have many benefits for science-based missions. First, commercial entities may be able to take greater levels of risk and test innovative ideas. As an example, while the principles of GPS radio occultation were developed and tested within government, firms like PlanetIQ and Spire were among the first to develop commercial applications based on them. Commercial approaches also tend to be low cost, providing researchers with lower-cost options for data collection, enabling the avenue of scientific data purchase. Lastly, commercial developments are able to create lower-cost components and technologies and have created a sizable market for spacecraft components and subsystems. There are now a number of vendors for off-the-shelf components, or those requiring minor modifications, useful for mission development. Star trackers, attitude control systems, momentum wheels, transponders, and power supplies are examples of such “stock” items, exploiting economies of scale not available to other space platforms to drive the price point down. However, some long-lead-time items, such as solar arrays, do remain.
___________________
4 Practica Capital, “Practica Capital Invests 200,000 EUR in Space Start-Up Company NanoAvionics,” http://practica.lt/en/news1/practica-capital-invests-200000-eur-in-space-startup-company-nanoavionics/, accessed April 7, 2016.
Finding. Commercial firms are a driver of both innovative application and technology development in the CubeSat sector. Commercial activity has accelerated the development of technologies—for example, attitude control, making it more robust and reliable for use in science missions.
TECHNOLOGY AREAS
Attitude and Orbit Determination and Control
Attitude Determination and Control
Perhaps the most significant improvement in CubeSat technology performance has been in attitude determination and control because this has, in turn, enabled the development and application of other subsystems, such as enhanced communication.
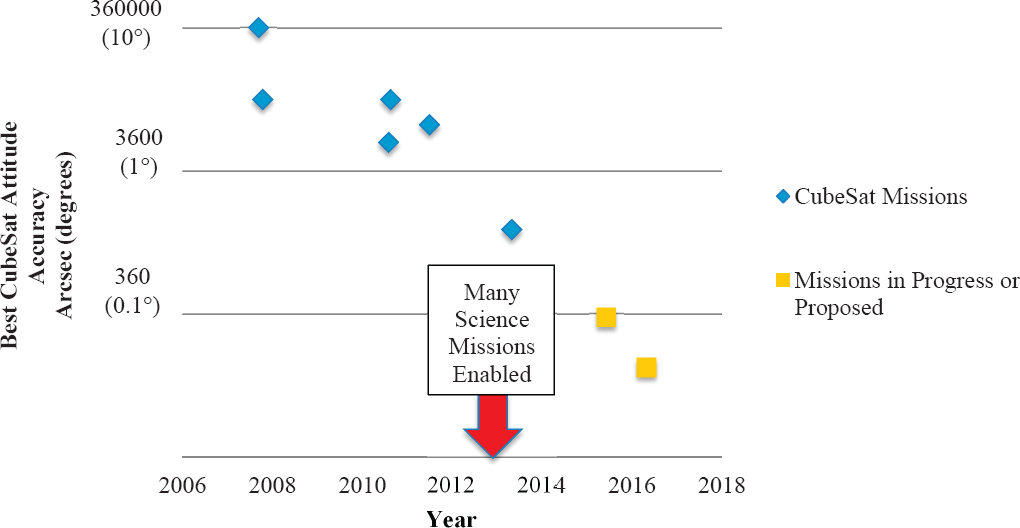
Early CubeSats used simple, often passive attitude control systems such as permanent magnets or electromagnets, resulting in attitude control of order ±10 degrees in low Earth orbit (LEO). CubeSat attitude determination techniques have significantly advanced in the past decade, with many of the techniques found on larger spacecraft now also available on CubeSats. These include Sun and Earth sensors; angular rate sensors, including inertial measurement units; and star trackers. Likewise, attitude control systems have improved, with systems such as reaction wheels and control moment gyros now commercially available from a number of retailers. Consequently, attitude determination has seen significant advances (Figure 5.2), with some CubeSat systems now claiming accuracy capabilities of <10 arcseconds, enabling theoretical 3-axis control to tens of arcseconds (<30-40 arcseconds).
The Optical Communication and Sensor Demonstration series of CubeSats (OCSD-A through C) aims to demonstrate attitude control of ±0.1 degree (360 arcseconds),5 comparable to many small spacecraft platforms currently used for Earth observation science missions. Furthermore, the MinXSS (Miniature X-ray Solar Spectrometer), due for deployment from the International Space Station in early 2016,6 seeks to demonstrate attitude control in tens of arcseconds using a commercially available Attitude Determination and Control System (ADCS), a potential improvement of three orders of magnitude from early CubeSats.
Orbit Determination and Control
Many CubeSats depend on the observations made by the Joint Space Operations Center (JSpOC) (two-line elements), which are available free of charge.7 However, some operators also use two-way ranging for increased accuracy. Orbits derived from two-way UHF ranging data can be accurate to within 2 km within 24 hours of the epoch.8
The onboard use of GPS is also becoming increasingly common for orbit determination, and it offers further improvements in accuracy to around 10 m in position and 1 m/s in velocity in post-processing. It should be noted that GPS is not used for attitude determination, as it can be on larger spacecraft, due to the challenge of gaining sufficient separation between antennas.
Attitude control is typically realized through the use of a reaction wheel system; however, their utility remains somewhat limited by the lack of a reactive propulsion system.9 This challenge extends to that of orbit control; however, methods such as differential drag control have been used to gain orbit separation between spacecraft and do offer some limited orbit-maneuvering capability.
___________________
5 S.W. Janson, R.P. Welle, T.S. Rose, D.W. Rowen, D.A. Hinkley, B.S. Hardy, S.D. La Lumondiere, G.A. Maul, and N.I. Werner, 2015, “The NASA Optical Communication and Sensors Demonstration Program: Preflight Up-date,” Proceedings of the AIAA/USU Conference on Small Satellites, Technical Session III: Next on the Pad, SSC15-III-1, http://digitalcommons.usu.edu/smallsat/2015/all2015/14/.
6 MinXSS successfully deployed from the ISS along with the CADRE CubeSat on May 16, 2016.
7 CelesTrak, updated March 3, 2015, http://www.celestrak.com/; Space-Track, https://www.space-track.org/auth/login/, accessed April 8, 2016.
8 Commercial tracking services are emerging. These may offer further improvements but also with a recurring cost.
9 Most systems rely on electromagnetic systems, such as torque rods.
Communication
Communication systems have been limited historically by the external surface area on CubeSats, the available power, and attitude control. Furthermore, the availability of suitable ground stations and adequate spectrum allocation means that communication is not only a technical issue but also a regulatory one. Many science missions in LEO can be accomplished with widely available antenna technology, as long as required data rates are moderate. Note that commonly available data rates have increased from around 9.6 kbps to over 1 Mbps in recent years. However, as missions become more sophisticated, it is expected that researchers and users will require faster access to ever-increasing amounts of data. This would put additional pressure on the technological requirements of CubeSat communication technology and in the development of ground stations. As an example, for the FIREBIRD mission, only 0.5 percent of the high-rate data was received due to the limitations of the telemetry system. If the mission had a radio with high enough bandwidth to retrieve all of the data, it would also have required significantly more power.10
The introduction of interplanetary CubeSats has driven the development of high-performance radios also capable of two-way communication (for command, navigation), such as the IRIS transponder developed for the INSPIRE and MarCO missions. Large antennae are also required in order to enable data retrieval for several of the deep space CubeSats under development or ready to launch, such as the Near Earth Asteroid (NEA) Scout and MarCO missions that will all communicate from about 1 AU from Earth. MarCO uses technology developed within ISARA (Integrated Solar Array and Reflectarray Antenna) technology demonstration mission.11
___________________
10 Personal communication, Alex Crew.
11 NASA, “Integrated Solar Array and Reflectarray Antenna (ISARA): Increasing CubeSat Downlink Data Rates to 100 Mbps,” release date May 3, 2013, https://www.nasa.gov/directorates/spacetech/small_spacecraft/isara_project.html.
A further potentially attractive solution for CubeSats would be the use of low-power optical communications. This could alleviate some spectrum regulation concerns while providing potential for multiple gigabits-per-second data rates. The NASA-sponsored, Aerospace Corporation-developed OCSD series plans to demonstrate data rates up to ~600 Mbps using optical communications in 2016, using an 80 cm diameter ground station (telescope).12
Mobility and Propulsion
Often, as secondary payloads, CubeSats are launched into an orbit selected by the primary launch payload, thus posing a limitation on the type of orbital designs available for nonmobile CubeSats. Mobility enabled by onboard propulsion (or other strategies discussed below) is, therefore, required to provide scientific CubeSats with the ability to change, or maintain, their orbits once they are in space. Mobility also enables formation flying, orbital deployment and maintenance of constellations, and an ability to compensate for atmospheric drag or trigger deorbit at the satellite’s end of life. Mobility can be characterized by the effective change in satellite velocity, or delta-V (ΔV). For example, in LEOs, a ΔV of 100 m/s provides a change of about 200 km in orbital altitude. Mobility also complements the capability of CubeSats to control their attitude to the precision required by a particular mission and would be required to dump stored momentum from the reaction wheels for CubeSats beyond LEO, when the magnetic field of Earth can no longer be used. At present, limited mobility options exist without overly penalizing the volume available to the payload.
Chemical and electric propulsion devices have been proposed and developed for CubeSats, each having particular miniaturization and operational challenges. Chemical thrusters make use of reactions that increase the kinetic energy of propellants. In general, the performance of chemical thrusters improves at higher temperatures and pressures, both of which present a serious concern when launched as secondary payloads. To protect the primary payload, CubeSats have to comply with the Launch Services Program Level Poly Picosatellite Orbital Deployer (P-POD) and CubeSat Requirements Document (LSP-Req-317.01); a waiver is required to allow chemically reactive substances and pressurized vessels over 1.2 atm in a CubeSat.
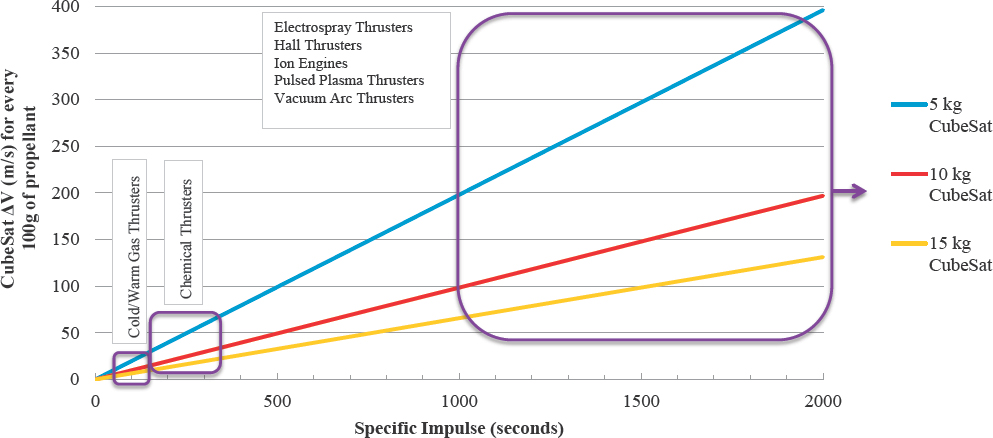
Electric propulsion has much higher fuel efficiency than chemical propulsion has but, in general, produces lower forces. Given the small mass of CubeSats and assuming sufficient time to maneuver, electric propulsion could be effective and consume small quantities of propellant. In general, electric propulsion does not use reactive materials that could damage primary payloads, although most concepts with heritage from larger satellites still need to carry pressurized vessels. Fuel efficiency is directly linked to the specific impulse (Isp) of a propulsion system; as Isp increases, the amount of propellant needed will decrease exponentially (see Figure 5.3), as such chemical propulsion systems have a lower Isp than do electric propulsion systems.
There are a few options at different stages of development that could circumvent the need for a launch waiver. For example, the chemical thruster HYDROS developed by Tethers Unlimited burns hydrogen and oxygen obtained from hydrolysis of water that is brought to space non-pressurized. Propulsion also has significant impact on system volumes because high-performance propulsion systems are generally difficult to miniaturize to <2U (two-unit) configurations. See Appendix C, Table C.1 for details on micro-propulsion options for CubeSats and their technical maturity to date.
Non-Propulsive Mobility Techniques
Non-propulsive mobility techniques include all other forms that do not require the use of propellants. For example:
- Differential drag can be used to control the relative separation between two or more spacecraft traveling along the same nominal orbit while on their relatively long orbital decay (e.g., used on Aerocube-6).
___________________
12 Gunter’s Space Page, “OCSD A, B, C (AeroCube 7A, 7B, 7C / IOCPS A, B, C),” http://space.skyrocket.de/doc_sdat/aerocube-7-ocsd.htm, accessed April 8, 2016; Aerospace, “Optical Communication and Sensor Demonstration (OCSD),” updated October 8, 2015, http://ocsd.aerospace.org/.
- Deployable structures to significantly increase drag, accelerating orbital decay and forcing reentry at the satellite’s end of life (e.g., used on CYGNSS).
- Systems based on electromagnetic forces, like the Electro-Magnetic-Formation Flight (EMFF) where each spacecraft includes orthogonal current coils that induce magnetic forces on its close neighbors to control relative attitude and spacing.
- Electrodynamic tethers, which are long conductive wires that are deployed from the spacecraft and could produce thrust or electrodynamic drag, depending on the direction of the electric current running along them while interacting with Earth’s magnetic field.
- Solar sails making use of photon pressure to change the momentum of the spacecraft and enable propellant-less mobility with potential applications for deep space CubeSats.
Electrical Power, Energy Storage, and Thermal Control
Early CubeSats employed body-mounted solar arrays, generating an orbit average power of a few watts per CubeSat unit. With the growth of CubeSats from 1U to 3U and beyond, the available orbit-averaged power from body-mounted cells naturally increases. However, such mounting remains fundamentally limited; hence, the use of deployable solar array panels has become increasingly common—enabled by the improvement in attitude control systems discussed in the subsection “Attitude and Orbit Determination and Control.” Consequently, orbit average powers of >50 W on a 3U CubeSat are now widely available.
Future solar cell power generation may theoretically reach efficiency values as high as 70 percent. However, to fully tap the potential of such increases in efficiency in CubeSats, cells need to be compact enough (low mass and volume), and efforts would likely be required to increase specific power. A potentially important future technology could be combining deployable systems with flexible solar cells. Terrestrial systems of >20 percent efficiency are available today, and so a 10 m2 deployed surface could generate >2 kW of power in Earth orbit.
Due to the low price point and efficiency, the use of Lithium-ion and Lithium-polymer batteries are relatively standard within CubeSats. A number of retailers offer off-the-shelf products that typically incorporate heaters, as well as protection against fire, thermal runaway, and other hazards. CubeSat Lithium-polymer batteries are readily available at power densities of >150 Wh/kg. As such, onboard power storage in excess of 30 Whr is widely available. Other units are available with storage levels up to 160 Wh, but they require greater volume, while some units can be connected in parallel to achieve higher capacities.
Low technology readiness level (TRL) concepts exist for CubeSat-compatible radioisotope thermoelectric generators. These concepts build on the principles developed for early artificial cardiac pacemakers, prior to Lithium-ion batteries becoming widespread, replacing the plutonium-238 with a more accessible fuel such as strontium oxide to produce around 5 mW at less than 7 percent efficiency. These devices could provide a useful source of heat in the outer solar system, but they also increase the complexity of the thermal design and may have possible issues with launch constraints.
Both onboard electrical power generation and storage have improved significantly since the first CubeSats. Although the improvement has not been of the magnitude seen in attitude control systems, storage capabilities continue to track terrestrial capabilities; however, peak power levels remain limited by battery discharge rates due to thermal concerns.
Thermal
Given the power-intensive characteristics and densely packed dimensions of payloads, thermal control can be a critical issue for many science missions; however, as the power density continues to increase, it is likely that thermal control of CubeSats will become even more challenging. Historically, CubeSats have largely employed passive thermal control techniques, including paint, thermal tape/straps, and Multi-Layer Insulation (MLI). Many missions addressing biological science objectives, such as Pharmasa and O/OREOS, used MLI and coatings to assist thermal regulation. Certain other passive techniques, such as heat-pipes or thermal louvers, have previously been considered ill-suited to CubeSats but are becoming more feasible (see Dellingr CubeSat).13
Recent development in the area of thermal control for CubeSats with applicability to low-temperature payloads, such as optical sensors and imaging spectrometers, include the concept of a deployable Sun shield, as planned for the 3U CryoCube-1,14 which has an estimated launch date in 2016. This concept is anticipated to support multi-month experiments using the attitude control system coupled with the Sun shield to attain temperatures of approximately 100 K, while active cooling will reduce this further to around 30 K. Other developments, such as a pulse tube micro-cryocooler, are also being designed to fit within 0.5U and 0.345 kg.15 A deployable radiator would offer the potential to dissipate significant amounts of heat; however, the concept is challenging on a CubeSat.
Deployable Systems
The widespread use of deployables on CubeSats for power generation with solar array panels, antennae, and Sun shields has already been discussed.
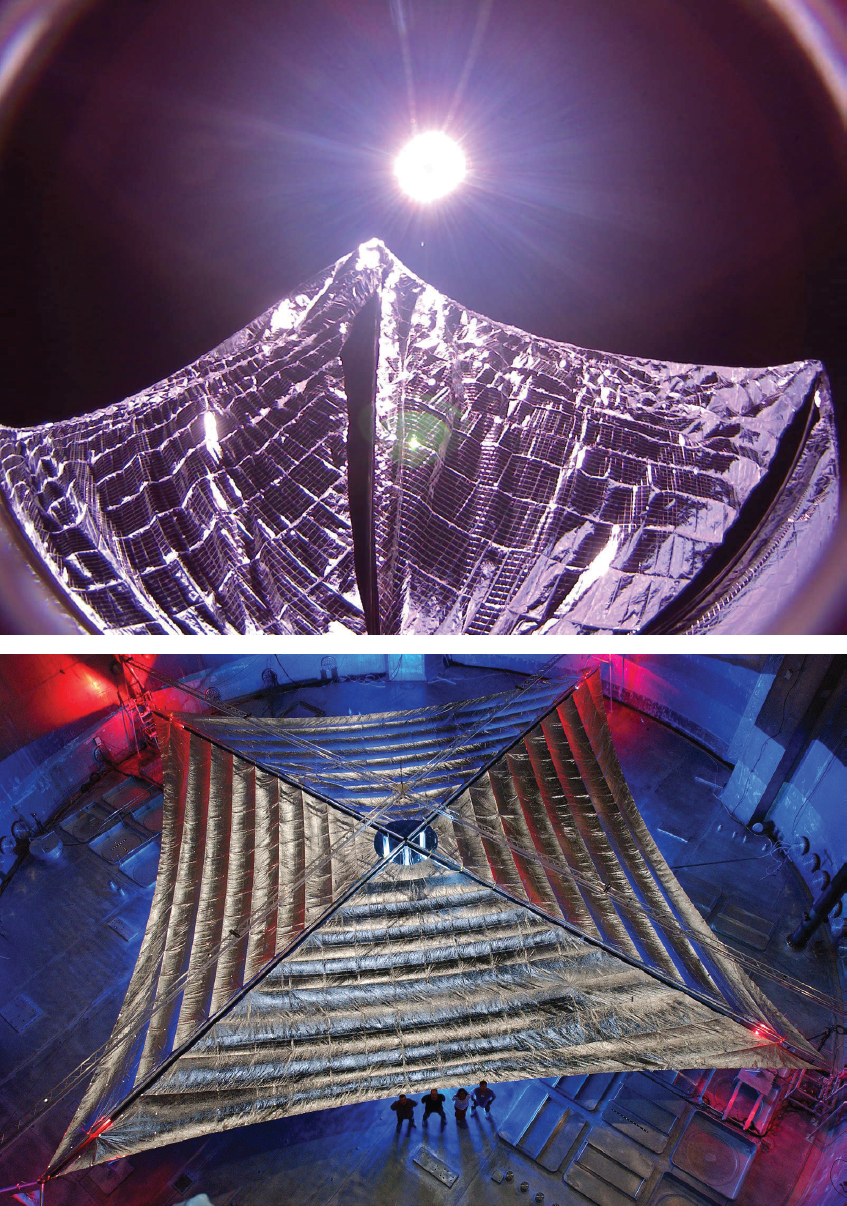
Another area of active research is the deployment of large gossamer structures and large area instrumentation surfaces (Figure 5.4). The NanoSail-D2 CubeSat deployed a 10 m2 gossamer structure in 2011 to study the deployment of such structures both for application in solar sailing and as a drag augmentation device to reduce the orbit lifetime, hence, aiding adherence to space debris mitigation guidelines (discussed in Chapter 6). Similar so-called drag-sails of varying architectures are commercially available to purchase.
___________________
13 NASA, “CubeSat Form Factor Thermal Control Louvers Project,” data sheet, http://techport.nasa.gov/view/14545, accessed November 15, 2015.
14 Sierra Lobo, “CryoCube,” http://www.sierralobo.com/cryocube/, accessed April 8, 2016.
15 J.R. Olson, P. Champagne, E. Roth, T. Nast, E. Saito, V. Loung, A.C. Kenton, and C.L. Dobbins, 2014, Microcryocooler for tactical and space applications, AIP Conference Proceedings 1573:357-364.
The NEA Scout CubeSat mission, due to launch with the Orion EM1 mission on the maiden flight of the Space Launch System (SLS) planned for 2018, will deploy gossamer structures in a solar sailing mode. The structure as envisioned will be supported by four booms, giving a sail area of approximately 85 m2.
Electrodynamic tethers have been proposed to assist in end-of-life deorbiting by generating drag force through an electromagnetic interaction with Earth’s magnetic field. Such tethers need to be deployed to lengths of hundreds of meters to several kilometers and may require active electronics. Deploying a tether, especially from an inactive and potentially tumbling spacecraft, is a challenging concept. The AeroCube-5 CubeSats are currently flying end-of-life electrodynamic tethers, with expected activation in 2016.
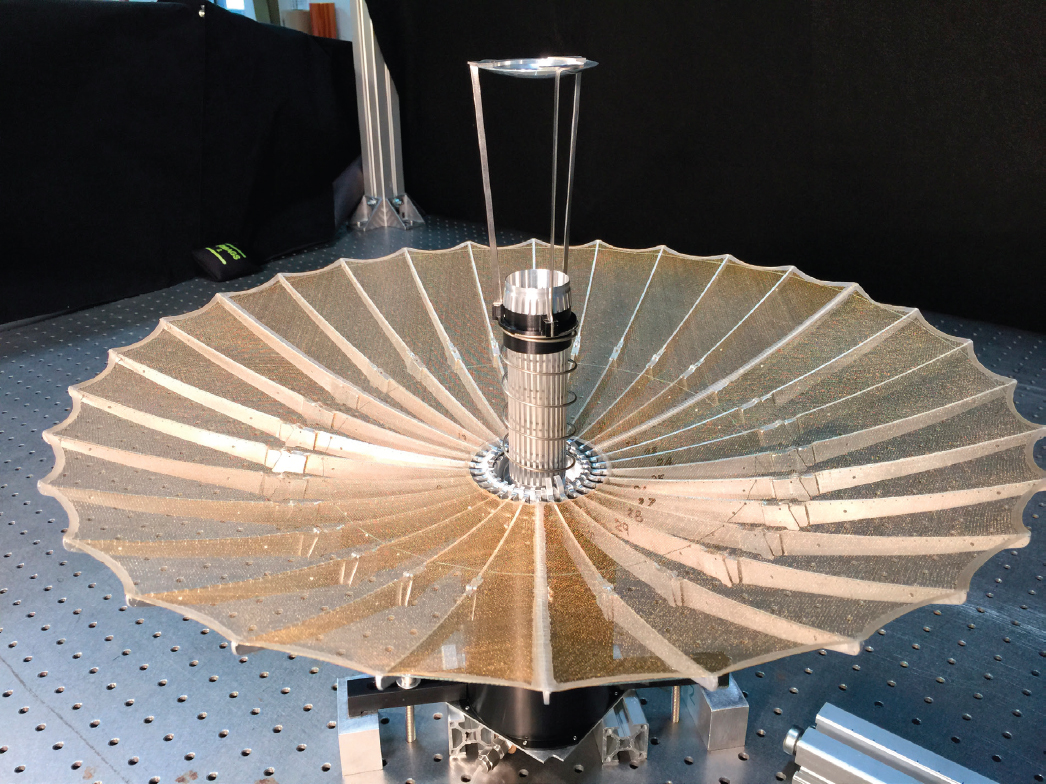
There have also been recent developments in parabolic deployable mesh antennas to support interplanetary CubeSat communications and development of active sensors such as radars (see Figure 5.5). Examples include the 0.5 m Ka-band Parabolic Deployable Antenna (KaPDA)16 developed for the NASA ESTO-sponsored RainCube 6U precipitation radar CubeSat (antenna stows within 1.5U), as well as the USC/ISI-designed 0.5 m deployable antenna that flew on the Aeneas CubeSat as a technology demonstration from which KaPDA was derived.17
Instruments and Sensors
The CubeSat form factor, power constraints, and thermal environments offer formidable challenges to the development of sensors that can perform valuable science measurements as part of CubeSat missions. The development of such instruments and novel sensors is thus a critical element for science CubeSats and, depending on the science requirements, will involve instruments that measure field, plasmas, and particles at a variety of masses and energies as well as electromagnetic radiation across the spectrum.
Often, heritage sensors have to scale down in size to fit within 1U of a CubeSat mission, leading to sensitivity changes of 1/R2 or even 1/R3 for a scaling factor R, especially for sensors that collect particles or photons. The sensitivity of these sensors and their dynamic range are markedly reduced, especially if R > 2. Depending on the measurement requirements, scaling heritage instruments therefore does not guarantee success, and often, new approaches need to be considered to perform the measurements.18,19 CubeSat instrument builders are also reimagining their instruments based on commercial off-the-shelf (COTS) parts. For example, the CINEMA mission used a COTS-based magnetoresistive space magnetometer.20 New detectors for imaging leverage progress in semiconductor technologies—for example, with the use of avalanche photodiodes. These enable the detection of very-low-intensity signals (i.e., down to a single photon), which compensate for decreased aperture and are of particular interest for astrophysics and for planetary imaging (e.g., during fast flyby or suboptimal illumination). An approach to the realization of very large apertures for cosmology is via the coordination of a large array of antennas and the synthesis of their observations. While the hardware is very simple (dipole antennas), science output relies on robust data handling and processing. Other imaging techniques also rely on strong support from science software and command and data handling (C&DH) systems, such as the cameras from Planet Labs and SkyBox, that use nonstandard techniques like time-delay integration and other super-resolution techniques that had been previously developed for microscopy.
___________________
16 J. Sauder, N. Chahat, R. Hodges, E. Peral, M. Thomson, and Y. Rahmat-Samii, 2015, “Ultra-Compact Ka-Band Parabolic Deployable Antenna for RADAR and Interplanetary Communications,” Proceedings of the AIAA/USU Conference on Small Satellites, Technical Session VI: Ground Systems and Communications, SSC15-VI-7, http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3207&context=smallsat.
17 M. Aherne, J. Barrett, L. Hoag, E. Teegarden, and R. Ramadas, 2011 “Aeneas-Colony I Meets Three-Axis Pointing,” Proceedings of the AIAA/USU Conference on Small Satellites, Technical Session XII: The Next Generation, SSC11-XII-7, http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=1181&context=smallsat.
18 A.B. Crew, B.A. Larsen, D.M. Klumpar, E. Mosleh, H.E. Spence, J. Legere, J.B. Blake, L. Springer, M. Widholm, S. Driscoll, S. Longworth, et al., 2012, Focusing on size and energy dependence of electron microbursts from the Van Allen radiation belts, Space Weather 10(11):1-3.
19 G.B. Andrews, T.H. Zurbuchen, B.H. Mauk, H. Malcom, L.A. Fisk, G. Gloeckler, G.C. Ho, J.S. Kelley, P.L. Koehn, T.W. LeFevere, S.S. Livi, R.A. Lundgren, et al., 2007, The energetic particle and plasma spectrometer instrument on the MESSENGER spacecraft, pp. 523-556 in The Messenger Mission to Mercury (D.L. Domingue and C.T. Russell, eds.), Springer, New York.
20 M.O. Archer, T.S. Horbury, P. Brown, J.P. Eastwood, T.M. Oddy, B.J. Whiteside, and J.G. Sample, 2015, The MAGIC of CINEMA: First in-flight science results from a miniaturised anisotropic magnetoresistive magnetometer, Annales Geophysicae 33(6):725-735.
Of special importance to various science-based CubeSat missions are technologies that require a stable and highly calibrated performance (i.e., for Earth observations), good thermal stability, especially at low temperatures (i.e., for infrared observations and some microgravity science), and measurements that require distributed apertures (i.e., for interferometry applications). The high-operating-temperature barrier infrared detector (HOT-BIRD21) holds particular promise in that area with the novel combination of multiple alloys. HOT-BIRD has a thermal sensitivity of 0.02°C and can be utilized for a variety of Earth, planetary, and astrophysical applications without the need for active cooling.
In summary, most CubeSat instruments are not just smaller copies of heritage instruments built for flight. Some instrument developments are evolutionary—focused on miniaturized sensors and science requirements consistent with smaller sensitivity or dynamic range than their heritage systems. However, many CubeSat instruments are revolutionary and use novel technology, they are COTS-based, or they use novel ways of detection or analysis of data.
___________________
21 NASA and Tech Briefs Media Group, “High-Operating-Temperature Barrier Infrared Detector With Tailorable Cutoff Wavelength,” release date February 1, 2011, http://www.techbriefs.com/component/content/article/ntb/tech-briefs/manufacturing-and-prototyping/9144.
Flight and Ground Systems Software
Numerous studies have contributed to a good general understanding of how to manage complexity in spacecraft flight software development, but the emphasis has been on large missions with hundreds of contributors developed over many years.22 The development and evolution of flight software for CubeSats has been fundamentally different: teams are smaller, are more willing to adopt new technology, rely more on testing than on formal verification methods, and often produce complete flight software solutions consisting of a few thousand lines of code as opposed to the millions of lines of code seen on large flight projects. The need for highly reliable, safe, and effective flight software for CubeSats remains, but the rapid pace of change in this area has not yet produced a set of widely adopted community standards. Identifying and developing flight software technology to address these challenges for CubeSats remains unresolved. Many of the spacecraft flown thus far have utilized a patchwork of scripts unsupported by an underlying CubeSat flight software architecture.
Software has progressed from custom hardware specific codes to integrated development environments, including open-source software. In practice, however, operations are sequential, with minimal capabilities for multitasking, scheduling, and priority-based actions. They remain highly impacted as changes are introduced to address new required capabilities as the operational needs of flight systems mature. Real-time operating systems are starting to address these challenges, increasing system responsiveness to support dynamic management of flight system resources such as power consumption.23 Nevertheless, challenges still remain for the science community developing new instruments that are not immediately compatible with such systems.
Many commercial hardware companies, such as Clyde Space, are including flight software systems that are modular and compatible with their hardware bus and associated subsystems. However, custom software interfaces may still be needed to integrate scientific payloads.
Specific areas where advances are needed include autonomy, robustness, extensibility, fault protection (tolerance and recovery), and auto-code generation. The ability to support high-performance multiprocessor architecture for spacecraft operations and payload processing would also be enabling. Flight and ground software system verification and validation with dynamic resource optimization also is necessary as a means of managing spacecraft resources effectively. In particular, for constellation and other advanced science opportunities, more capability will be demanded of CubeSat flight software.24,25
There are new efforts to develop provably correct general-purpose CubeSat flight software, such as CubedOS,26 which is intended for use on the Lunar IceCube mission. While experimental, such efforts are trying to advance the leading edge of how CubeSat flight software would be developed.27
Data Handling, Processing, and Autonomy
CubeSat development has benefited from the increasing availability of low-cost consumer electronics for data processing and storage. Examples of this include CubeSats such as STRaND-1 and PhoneSat, which used unmodified consumer-grade off-the-shelf smartphones.28 Science missions may, however, require systems with
___________________
22 NASA, 2009, NASA Study on Flight Software Complexity (D.L. Dvorak, ed.), http://www.nasa.gov/pdf/418878main_FSWC_Final_Report.pdf.
23 A. Kalman, 2015, “How a Lightweight RTOS can Drive CubeSat Flight Software,” presented at CubeSat Developers’ Workshop, Utah State University, http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3290&context=smallsat.
24 C. Brandon, and P. Chapin, 2015, High integrity software for CubeSats and other space missions, Proceedings of 66th International Astronautical Congress, http://web.vtc.edu/users/pcc09070/papers/brandon-chapin-IAC-2015.pdf.
25 G. Manyak, 2011, Fault tolerant and flexible CubeSat software architecture [Master’s thesis], California Polytechnic State University, San Luis Obispo, California.
26 Vermont Technical College, “CubeSat Laboratory,” updated August 3, 2015, http://www.cubesatlab.org/CubedOS.jsp.
27 Communication and navigation control of multiple craft in swarms has been studied and implemented for autonomous underwater vehicles. Such techniques may be applicable to CubeSats as well. W. Gao, Y. Liu, B. Xu, and Y. Che, 2014, An improved cooperative localization method for multiple autonomous underwater vehicles based on acoustic round-trip ranging, paper presented at IEEE/ION Position, Location and Navigation Symposium, Monterey, California, http://ieeexplore.ieee.org/xpl/articleDetails.jsp?tp=&arnumber=6851518&url=http%3A%2F%2Fieeexplore.ieee.org%2Fxpls%2Fabs_all.jsp%3Farnumber%3D6851518.
28 The software was modified; however, the electronics were not. Both flew a Google NEXUS phone.
increased robustness and reliability, at the cost of reduced capability, with a wide range of such systems already available for purchase.
The most common source of onboard memory is SRAM.29 However, other technologies are available, and Flash is popular for mass storage. Consideration is also being given to levels of radiation tolerance as well as mitigation techniques as CubeSat developers begin to develop missions beyond LEO.
Within the ground segment, once again the use of commercial hardware and software is more common than in traditional space systems. Indeed, many are based on systems derived or developed from within the amateur community and are dependent on a single antenna. However, drawing on the amateur community, a large ad hoc network can be established—typically, clustered in North America and Europe. As more complex onboard communication systems are developed, the CubeSat ground segment will need to keep pace.
A driver in all space missions is the operations cost; hence, automation significantly reduces CubeSat mission costs and risks. A further innovation in the ground segment is the GENSO (Global Educational Network for Satellite Operations) concept, developed and maintained under the auspices of the European Space Agency (ESA), which sought to provide educational CubeSat operators with access to a global network of ground stations to maximise CubeSat utilization.
Inter-satellite communication hardware necessary for many constellation and formation flying missions has been used by a number of organizations. This includes systems in both LEO (i.e., Globalstar terminals) and in geostationary orbit. Data relays are therefore viable and flight-proven options to both reduce ground-segment setup costs and, potentially, reduce data latency. Onboard data processing, autonomous systems, and navigation could further reduce the burden and cost of the ground segment and mission operations in CubeSats.
For science missions using constellations or swarms of CubeSats, the issue of “fleet management” must be considered. In particular, the ground segment to operate such a fleet must be carefully developed for both nominal operations and for overcoming anomalies.
System Integration, Platforms, and Constellations
Given the number of science missions that can benefit from constellation architectures, several technologies for constellation networking are in development. The technologies required to enable constellations include streamlined manufacturing, constellation launch and deployment, constellation operations, and data management and analysis.
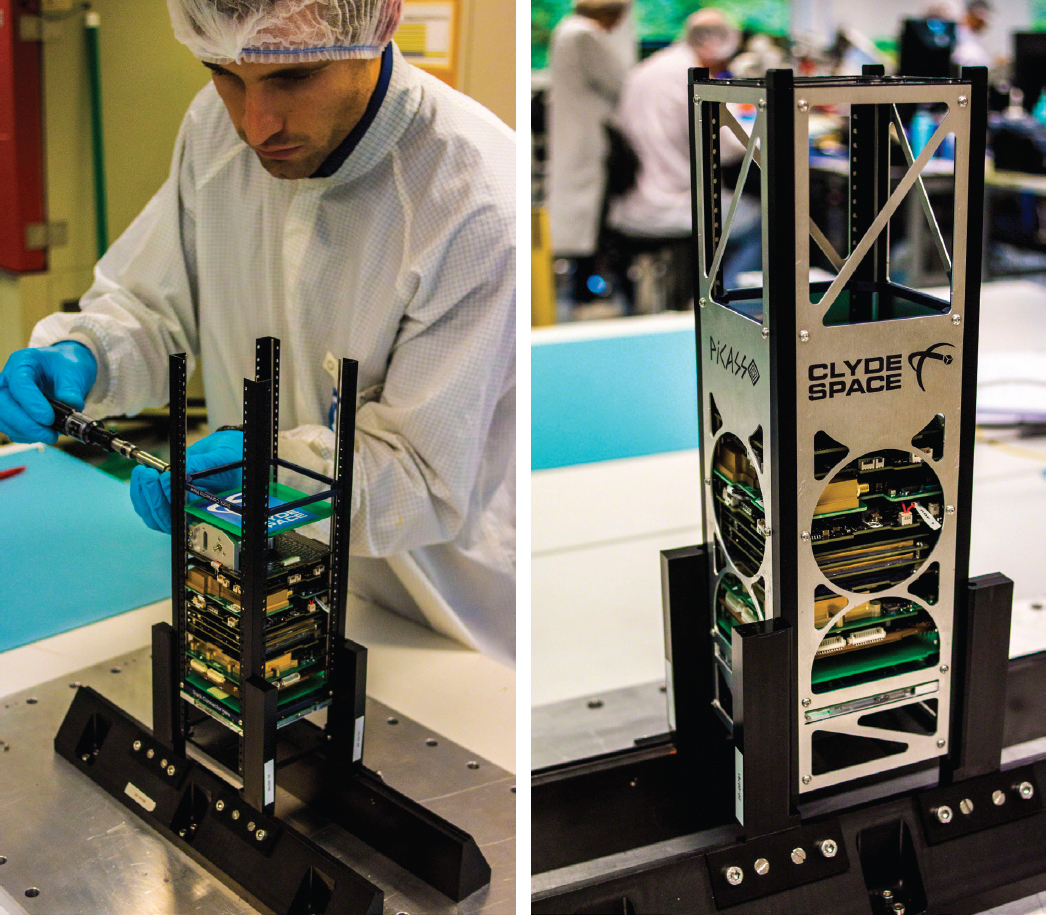
An early example of large swarms is the European QB50 project,30 where every CubeSat is independent but will fly a common payload selected from a set of three options to study the lower thermosphere. Several European developers offered QB50 compatible platforms (Figure 5.6). Extending this concept further, Clyde Space, based in Scotland, is working with Outernet Inc., USA, as the anchor customer to further develop high-performance off-the-shelf spacecraft buses.31 Other European and North American operators are also developing similar off-the-shelf spacecraft buses. These off-the-shelf platforms are designed to be mission independent, giving them a large operating envelope that is not optimised for any particular use. The development of high-performance, off-the-shelf CubeSats is expected to drive down the unit cost, which in turn will reduce the cost of constellation and swarming science mission concepts that seek to make rapidly repeating measurements.
Most CubeSats have been launched as secondary payloads; however, constellations launches are most likely to occur in dedicated vehicles. Constellation setup and orbit maintenance have been discussed in the subsection “Mobility and Propulsion.”
___________________
29 SRAM = Static random-access memory.
30 See the QB50 project website at https://www.qb50.eu/, accessed April 8, 2016.
31Gov.UK, “CubeSats to provide telecomms through international partnership,” release date March 13, 2015, https://www.gov.uk/government/news/cubesats-to-provide-telecomms-through-international-partnership.
Constellations will rely on multielement autonomy, coordinated fleet navigation, and the development of a variety of quality of service and routing techniques. Furthermore, enhanced intra-satellite communication approaches may be required—for example, involving switchable-beam directional antennas for direct control of data routing. Current science data management techniques (tracking instrument health, calibration changes, and anomaly response) do not generally include more than 10 spacecraft.
















