
7
Intelligence, Surveillance, and Reconnaissance
7.1 INTRODUCTION
The principal function of the intelligence, surveillance, and reconnaissance (ISR) component of command, control, communications, computers, intelligence, surveillance, and reconnaissance (C4ISR) is to find, fix, and track both friendly and hostile forces, as well as to assess damage to hostile targets in an area of interest. In addition to sensing (collection), the function includes the tasking of sensors and the integration, interpretation, and exploitation of sensed information.
The objectives of this chapter are to review the current and planned ISR capabilities of naval strike groups (Section 7.2); to point out ISR shortfalls in those capabilities (Section 7.3); to discuss key principles for a future ISR architecture for the Naval Services (Section 7.4); to show how these principles can be implemented in the tasking, collection, and exploitation of ISR for naval forces (Section 7.5); and to present the findings and recommendations of the committee (Section 7.6).
7.2 KEY CURRENT AND PLANNED ISR ASSETS
The ISR capabilities of naval strike groups are provided by a host of naval, joint, and national sensor systems that can be space-based, airborne, on-the-surface, and subsurface platforms, and by a number of ground- and ship-based systems for the tasking of the sensors and exploitation of the sensor data. This section provides a brief overview of these systems and their applicability to naval missions.
7.2.1 Current and Planned Space-Based ISR Systems
The nation has powerful space-based image intelligence (IMINT), signals intelligence (SIGINT), and measurement and signatures intelligence (MASINT) collection systems and is in the process of developing even greater capabilities. It is essential that naval forces have access to data from these capabilities and that they be able to task the capabilities.
National IMINT systems provide photographic coverage over denied territory that, through the science of stereophotogrammetry, enables precise geodetic positioning of targets on the ground. For decades these capabilities have provided the means for precision strike against fixed targets; as the speed of tasking, collection, and processing has increased, the same capabilities have begun to put relocatable targets at risk. New satellite constellations are in progress under the Future Imagery Architecture program of the National Reconnaissance Office (NRO).
SIGINT systems have global coverage and provide geodetic positioning of platforms emitting at radio frequencies. Their product is quickly and widely broadcast to tactical forces afloat and in the field, where it is used for strike targeting and defense avoidance and suppression, among other purposes.
Defense Support Program (DSP) satellites for decades served as sentinels for the early warning of the launch of strategic intercontinental ballistic missiles. In recent years the infrared-based MASINT data from these satellites have been exploited to cue systems defending against shorter-range tactical ballistic missiles. In addition, the DSP ability to estimate launch points enables counterattack against elusive Transportable Erector Launchers (TELs). New, more capable systems denoted Space-Based Infrared Systems (SBIRS) High and Low are under development.
Defense Meteorological Support Program (DMSP) satellites and related space, atmospheric, and surface observations are used by the Fleet Numerical Meteorological and Ocean Center (FNMOC) to make now-casts and forecasts of a wide variety of oceanographic and atmospheric variables. Such surface wind and wave forecasts are of the utmost importance in naval operations as well as in planning ISR observations. FNMOC forecasts are especially valuable over ocean areas where other meteorological forecasting services do not provide the information necessary for effective naval air and surface operations.
7.2.2 Current and Planned Airborne ISR Systems
The Navy and the Department of Defense (DOD) are developing impressive improvements to airborne surveillance capabilities. The new Multimission Maritime Aircraft, Broad Area Maritime Surveillance Unmanned Aerial Vehicle (UAV), and Aerial Common Sensor, together with upgrades to the Global Hawk and Predator UAVs and E-2C aircraft, will provide information to enhance sig-
nificantly the air, ground, sea-surface, and subsurface pictures. It appears to the committee that aviation budgets will be strained in future years to pay for the development and production of these assets and for the simultaneous production of multiple tactical aircraft. The C4ISR capabilities need to be protected from budget cuts.
Also, naval strike groups need better access to data from existing highly capable Air Force and joint airborne assets such as the Airborne Warning and Control System (AWACS), Joint Surveillance Target Attack Radar System (JSTARS), and the U-2 aircraft.
Table 7.1 summarizes key current and planned airborne ISR platforms, compares some of their important kinematic capabilities, lists the primary sensors that they carry, and identifies the principal missions that they support. Section D.1 in Appendix D presents a more detailed discussion of the status and capabilities of these platforms.
7.2.3 Current and Planned Surface-Ship ISR Systems
As discussed in Chapter 2, previously clear distinctions between C4ISR and combat systems are blurring; this trend is likely to increase with the advent of network-centric operations. Sensors onboard Navy surface ships are often integral parts of combat systems, but data shared with other units can cue other sensors and can fuse with other data to create a more complete picture or add to a commander’s situational awareness.
Air defense radars (e.g., SPY-1, SPS-48, SPS-49) on Aegis cruisers and destroyers, networked via cooperative engagement capability (CEC), are prominent contributors to the Joint Force Commander’s air picture in littoral operations. New air defense radars are being developed as part of the next-generation, multimission destroyer (DDX) program. A dual-band (L and X) capability is planned to provide horizon and volume search. The Littoral Combat Ship (LCS) under development is planned to have modules with various capabilities, including ASW and mine warfare. These modules are yet to be defined. Surface-ship antisubmarine warfare (ASW) systems are discussed in more detail in Section 7.2.5.
7.2.4 Current and Planned Submarine ISR Systems
Attack submarines (nuclear propulsion) (SSNs) are often employed for ISR in coastal regions—for their SIGINT capabilities, for the deployment of Special Operations Forces, and in general, to take advantage of their covert nature. Attack submarine ASW systems are described in Section 7.2.5. The nuclear-powered, guided-missile submarine (SSGN) under development will have special capabilities for deploying Special Operations Forces.
TABLE 7.1 Summary of Key Current and Planned Airborne ISR Platforms
|
Name |
Lead Service |
Basing |
Rangea or Endurance (nmi) |
Speed |
Ceiling (thousand ft) |
Primary ISR Sensors Carried |
Principal Missions Supported |
|
E-2C Hawkeye |
USN |
Carrier |
1,500 |
260 ktb 325 ktc |
37 |
Radar |
TAMD |
|
P-8A Multimission Maritime Aircraft (MMA) |
USN |
Land |
4 hr at 1,200 nmi |
490 kt |
41 |
SAR, ISAR, surface radar, EO, IR, MAD, sonobuoys |
ASW, ASuW, Strike |
|
Aerial Common Sensor (ACS) |
USA |
Land |
>2,500 |
>400 ktc |
>35 |
SIGINT, IMINT, MASINT |
Strike |
|
F/A-18C/D Hornet |
USN |
Carrier Land |
1,089d |
>1.7NMa |
>50 |
Radar, ATARS |
Strike |
|
F/A-18E/F Super Hornet |
USN |
Carrier |
1,275d |
>1.8NMa |
>50 |
Radar, SAR, GMTI, FLIR, SHARP, IMINT |
Strike |
|
F-35 Joint Strike Fighter (JSF) |
USAF USN |
Land Carrier |
>1,200e,* >900f,* |
Supersonic |
35 |
Radar, SAR, GMTI, IR, EO |
Strike |
|
SH-60 Seahawk (LAMPS) Helicopter |
USN |
Ship |
380* |
180 kt |
19 |
Radar, sonobuoys, dipping sonar and EO, FLIR, MAD |
ASW, ASuW |
|
E-8C JSTARS |
USAF |
Land |
9 hr* |
390 to 510 kt |
42 |
SAR, GMTI |
Strike |
|
E-3 Sentry (AWACS) |
USAF |
Land |
>8 hr* |
310 ktb |
>29 |
Radar |
TAMD |
|
U-2S/TU-25 Surveillance and Reconnaissance Aircraft |
USAF |
Land |
>6,090 |
>410 kt |
>70 |
IMINT, EO, IR, radar, SIGINT, SAR |
Strike, Maneuver, BMD |
|
RC-135V/W Rivet Joint |
USAF |
Land |
3,400* |
>435 kt |
30 |
SIGINT |
Strike |
|
E-10 Multi-Sensor Command and Control Aircraft |
USAF |
Land |
TBD |
TBD |
TBD |
GMTI, AMTI |
Strike, Cruise Missile Defense |
|
Global Hawk UAV |
USAF |
Land |
12,000 |
340 kt |
65 |
SAR, GMTI, EO, IR, SIGINT |
Strike |
|
Broad Area Maritime Surveillance UAV |
USN |
Land |
>8 hr at 2,000 nmi |
TBD |
TBD |
Radar, SAR, ISAR, EO, IR |
ASuW, ASW, Strike |
|
MQ-1/9 Predator UAV |
USAF |
Land |
24 hr at 400 nmi |
70 ktb 117 ktc |
25 |
EO, IR, SAR |
Strike |
|
Fire Scout VTUAV |
USN |
Ship |
200 |
125 kt |
20 |
EO, IR |
Strike, Naval Fire Support |
|
Eagle Eye |
USN |
Ship Land |
3 hr at 100 nmi |
185 kt |
20 |
EO, IR |
Strike, Maneuver, Naval Fire Support |
|
Name |
Lead Service |
Basing |
Rangea or Endurance (nmi) |
Speed |
Ceiling (thousand ft) |
Primary ISR Sensors Carried |
Principal Missions Supported |
|
Scan Eagle |
USN |
Ship Land |
>15 hr |
50 kt |
>16 |
EO, IR |
Strike, Maneuver, Naval Fire Support |
|
J-UCAS |
USAF USN |
Carrier Land |
2 hr at 1,000 nmi |
TBD |
TBD |
ELINT, EO, IR, radar |
SEAD, Strike |
|
NOTE: An asterisk (*) indicates those platforms that are capable of in-flight refueling. a Unrefueled range. b Cruise. c Maximum. d Clean with two AIM-9s. e Conventional takeoff and landing, F-35A and F-35C. f Short takeoff and vertical landing (STOVL), F-35B. AMTI, airborne moving target indicator; ASuW, antisurface warfare; ASW, antisubmarine warfare; ATARS, Advanced Tactical Air Rec onnaissance System; AWACS, Airborne Warning and Control System; BMD, ballistic missile defense; ELINT, electronic intelligence; EO, electro-optical; FLIR, forward-looking radar; GMTI, ground moving target indicator; IMINT, image intelligence; IR, infrared; ISAR, inverse synthetic aperture radar; JSTARS, Joint Surveillance Target Attack Radar System; J-UCAS, Joint-Unmanned Combat Air System; kt, knot; LAMPS, Light Airborne Multipurpose System; MAD, magnetic anomaly detection; MASINT, measurement and signatures intelligence; NMa, Mach number; SAR, synthetic aperture radar; SEAD, suppression of enemy air defenses; SIGINT, signals intelligence; TAMD, Theater Air and Missile Defense; TBD, to be determined; UAV, unmanned aerial vehicle; VTUAV, VTOL tactical unmanned aerial vehicle (Fire Scout); VTOL, vertical takeoff and landing. |
|||||||
7.2.5 Current and Planned Antisubmarine Warfare ISR Systems
The Naval Services must bear primary responsibility in the DOD for undersea ISR. Given the current state of affairs in ASW and its relevance to the Naval Services, this subsection briefly summarizes current and planned ASW systems. Departing somewhat from the format in Section 7.2 thus far, this subsection addresses ASW systems in all platforms and basing modes. Future ASW may involve a network of sensors of all types. For a discussion of mine warfare systems, see the 2001 Naval Studies Board report Naval Mine Warfare.1
The ASW mission today involves ship, submarine, and airborne sensors, together with arrays of sonar sensors deployed on the ocean floor. Surface combatant ships and attack submarines carry hull-mounted sonars and towed arrays. Fixed-wing aircraft and helicopters carry magnetic anomaly detection (MAD) sensors; traditional electro-optical (EO), infrared (IR), SIGINT, and radar systems; sensors optimized for detecting periscopes in sea clutter; and dipping sonars. A class of noncombatant ships keeps station in specific ocean areas and tows sonar arrays. Several types of deployed sonar arrays exist or are under development. The arrays send raw acoustic data over connecting cables to shore sites or, in the future, to the LCS. Section D.2 in Appendix D provides more detail on current and planned ASW sensors using a mix of connectivity.
7.2.6 Current and Planned Systems for Tasking and Exploitation
Current Systems
Naval strike groups today rely on a large number of disparate systems, sometimes with overlapping capabilities, for tasking and exploitation. The Tactical Control System was a DOD attempt to achieve a common system for controlling UAVs and receiving data from them, but as new UAVs have been introduced, the number of separate control systems has been increasing.
Similarly, the DOD directed the development of a common Joint Service Imagery Processing System (JSIPS), but only the Navy version, JSIPS-N, came to fruition. The Naval Air Systems Command developed JSIPS-N and later the Precision Targeting Workstation (PTW) for using imagery to derive geodetic targeting coordinates for the Tomahawk cruise missile and tactical aircraft. The Army developed the Tactical Exploitation System (TES) and interested the Naval Sea Systems Command in using a naval variant (TES-N) on surface combatant ships. The two systems (JSIPS-N and TES-N) have overlapping capabilities and produce somewhat different results. A conflict arose that led the Assistant Secretary of the Navy for Research, Development, and Acquisition (ASN[RDA]) to
appoint a Direct Reporting Program Manager for the two systems. Similar conflict among the Navy, Army, Air Force, and Marine Corps led the Under Secretary of Defense for Acquisition, Technology, and Logistics (USD[AT&L]) to direct that the Services cooperate in developing the Distributed Common Ground Station, discussed below.
Distributed Common Ground Station
The Distributed Common Ground Station (DCGS) is the cooperative effort of the Services and agencies for tasking, processing, exploitation, and dissemination (TPED) of information from collection platforms. The DCGS will greatly enhance future U.S. strike operations. It combines command-and-control systems, ground stations for UAVs and manned aircraft, IMINT and SIGINT dissemination and processing capabilities, and targeting systems into an architecture that can be scaled up to support major commands and scaled down for installation on tactical platforms. To ensure interoperability, the U.S. Air Force (USAF) is developing a DCGS Integrated Backbone (architecture, standards, tools, and documentation) that it will provide to the other Services as they develop their variants.
The DCGS creates a shared-information environment by incorporating all sensors and ground stations on a common network. It will greatly improve the flow of timely intelligence, enhancing the joint and combined warfighters’ capabilities as well as providing common exploitation, information management, and tools for network management and security. The Navy’s concept of operations for its DCGS variant is shown in Figure 7.1. Three tiers are planned, to provide scaled, distributed capabilities.
The DCGS-N will be fielded in a spiral development that will ultimately integrate a large number of legacy and new capabilities into one system. There will be interdependencies with Global Command and Control System-Maritime (GCCS-M) (discussed in Chapter 4). Figure 7.2 portrays top-level plans for the integration of various legacy and new capabilities into DCGS-N. The column of capabilities to the right in this figure represents the DCGS Integrated Backbone to be provided by the USAF. Note the incorporation of JSIPS-N and TES-N capabilities and the unified UAV service. DCGS-N is the logical host for new concepts for tasking, processing, and exploitation, such as those discussed in Section 7.5.
7.3 ISR SHORTFALLS WITH CURRENT AND PLANNED SYSTEMS
This section points out shortfalls that the committee sees with current and planned Navy ISR systems. The major shortfalls for Sea Shield in Major Combat Operations (Table 7.2) center on undersea warfare, but there are significant limitations in other Sea Shield missions as well. For Sea Strike in Major Combat
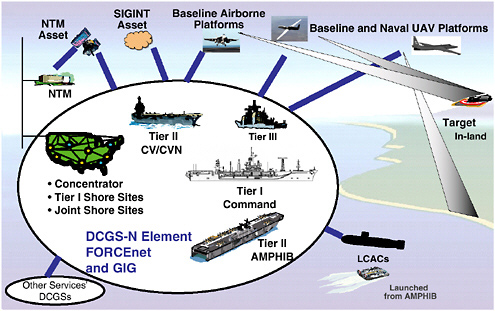
FIGURE 7.1 Concept of operations for the naval variant of the Distributed Common Ground Station (DCGS-N). NOTE: NTM, National Technical Means; SIGINT, signals intelligence; UAV, unmanned aerial vehicle; CV/CVN, aircraft carrier, nuclear-powered aircraft carrier; GIG, Global Information Grid; AMPHIB, amphibious class of ships; LCAC, landing craft, air-cushioned; Tier I, Ashore/Numbered Fleet; Tier II, Fleet (expeditionary strike group/carrier strike group); Tier III, Unit/Tactical Level (surface, subsurface, airborne, and Special Operations Forces platforms). SOURCE: Lorraine Wilson, Office of the Assistant Secretary of the Navy for Research, Development, and Acquisition, “DCGS-N Perspective,” presentation to the committee, October 21, 2004.
Operations (Table 7.3), the major shortfalls are in persistent wide-area surveillance and sensor-data exploitation, but again there are limitations in other ISR functions. These shortfalls are discussed below at greater length, together with some potential solutions. Section 7.5 amplifies on the solutions.
7.3.1 ISR Shortfalls in Antisubmarine Warfare and Potential Solutions
ASW is moving toward greater reliance on distributed and off-board sensors and vehicles because of the limited search rates possible with organic sensors on manned platforms, particularly in adverse littoral environments against small, quiet diesel electric submarines. There are not enough manned platforms available to conduct ASW early in most contingencies. Required situational awareness and force-protection capabilities will only be possible by distributing sensors rather than manned warships (surface combatants and submarines).
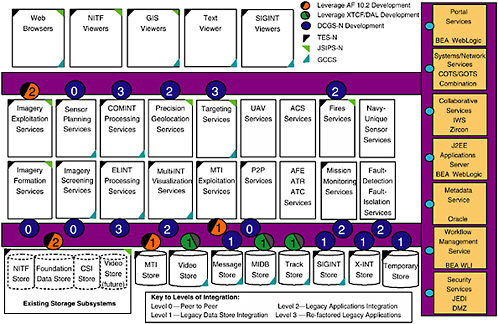
FIGURE 7.2 Levels of integration in the DCGS-N. NOTE: NITF, National Imagery Transmission Format; GIS, Geospatial Imagery System; SIGINT, signals intelligence; GCCS, Global Command and Control System; COMINT, communications intelligence; CSI, common scene imagery; MTI, moving target indicator; MIDB, multi-intelligence database; X-INT, arbitrary intelligence source. SOURCE: Lorraine Wilson, Office of the Assistant Secretary of the Navy for Research, Development, and Acquisition, “DCGS-N Perspective,” presentation to the committee, October 21, 2004.
TABLE 7.2 Key Sea Shield ISR Shortfalls in Major Combat Operations
|
Mission |
Required Capabilities |
Key ISR Shortfall |
|
Theater Air and |
Overland air and missile defense |
Target identification and target Missile Defense detection and tracking over rough terrain (blockage) |
|
|
Joint operations |
Lack of a single, integrated air picture owing to a lack of interoperability among CEC, Link 11, Link 16, and other links |
|
Undersea Warfare |
Self defense against subsurface threats |
Area coverage to detect and identify diesels and torpedoes |
|
|
Offensive operations against subsurface threats |
Area coverage to detect and identify diesels |
|
|
Countering of minefields in deep or shallow water |
Detection and identification of low-signature mines |
|
|
Breaching of minefields and barriers in very shallow water or on the beach |
Detection and identification of low-signature mines |
|
Surface Warfare |
Self defense against surface threats |
Persistent area coverage to detect and identify surface threats; inability to track individual craft |
|
|
Offensive operations against surface threats |
Persistent wide-area coverage |
|
Force Protection |
Protection against Special Operations Forces and terrorist threats |
Persistent area coverage for detection and identification |
|
|
Mitigating effects of CBRNE |
Area coverage |
|
|
Network protection |
Intrusion detection |
|
NOTE: CBRNE, chemical, biological, radiological, nuclear, and enhanced conventional weapon. |
||
TABLE 7.3 Key Sea Strike ISR Shortfalls in Major Combat Operations
|
Mission |
Required Capabilities |
Key ISR Shortfalls |
|
Strike |
Hitting time-critical relocatable ground targets |
Persistent surveillance and timely data exploitation |
|
|
Special operations |
Embedded coverage and analysis |
|
|
Offensive information operations |
Assessment of network attacks |
|
Naval Fire Support and Maneuver |
Precision fires |
Persistent coverage with timely, precise targeting |
|
|
Extended-range fires |
Persistent coverage |
|
|
Hitting moving ground targets |
Persistent coverage and precision tracking, tightly integrated with weapons delivery |
As targets get quieter and if passive systems are to be used, detections will be very intermittent and short-lived, and the Navy must be able to direct and deploy assets very quickly to an area of interest before the data become old and the search problem must be reinitiated. Surface ships and submarines do not have the speed to carry out this kind of detection scenario unless they happen to be near the target. This fundamental change in the character of acoustic ASW, from long-range persistent detection and tracking to much shorter-range, intermittent detection and tracking, requires an ISR system built more on sensor networking than on the older, platform-on-platform approach. However, the state of the art for both distributed wide-area surveillance acoustic systems (needed for cueing tactical ASW forces) and for distributed large-area tactical ASW acoustic sensors (needed to achieve high search rates in the absence of surveillance cues) is limited by current command, control, and communications (C3) constraints.
The ASW surveillance systems of today rely on passive acoustics and fiberoptic cable to send information back to operators for detection and classification. But reliance on cable makes it difficult to employ the surveillance arrays on the ocean bottom rapidly and/or covertly, and cable-based systems are subject to trawling and other human-made measures that can greatly undermine their survivability and/or persistence. In order to be free of such problems with cables, it will be necessary to increase the in-array automated detection and classification capabilities for each surveillance node (e.g., by employing multispectral sensors and advanced computer-aided detection and classification algorithms). These capabilities in turn will reduce the total RF communications bandwidth requirement (size of the “pipe”) for a large field of distributed surveillance arrays. Nevertheless, there is much technology still to be demonstrated in this area, including the ability to communicate from far forward locales off an adversary’s coast by low-probability-of-detection/interception (LPD/LPI) methods and to link such ships as the LCS and its modules beyond line of sight, as needed.
The ASW large-area search systems are typically sonobuoy-based and reliant on active acoustic multistatic techniques to achieve high contact rates in offensive or defensive roles. Today, active multistatic techniques are largely made possible by having P-3 aircraft constantly monitoring the distributed field. These P-3 aircraft are tied up indefinitely reseeding and monitoring these sensor fields, and they are potentially vulnerable to adversaries’ countermeasures (i.e., attacks on the aircraft or their bases in areas where air superiority is being contested). Once again, with breakthroughs in sensor processing to reduce the RF communications bandwidth requirements and in battery technology (to increase system endurance from hours to at least a few days), there would be less reliance on P-3s for reseeding and monitoring. They would be freed up for other tasks (ASW and non-ASW). But the “long pole in the tent” is, of course, a successful communications architecture that is able to get timely multistatic contact information to tactical ASW assets on the scene (note that most of these contacts will end up being false contacts as opposed to real targets, which is the nature of
active acoustics). These active multistatic systems will only prove useful if the information generated from them can be successfully correlated and fused to form a relatively coherent undersea picture.
Finally, unmanned vehicle programs are progressing toward a variety of ASW applications, ranging from UAVs equipped with nonacoustic sensors for large-area search, to unmanned surface vehicles (USVs) equipped with active sources as part of multistatic operations, and to unmanned underwater vehicles (UUVs) relying on special onboard sensors that can support covert tracking and trailing operations against adversaries’ submarines during prehostilities. Yet, command and control (C2) of unmanned vehicles is not very mature and will ultimately depend on advances in acoustic and RF communications. For example, advanced acoustic communications techniques between UUVs, surveillance arrays, and host SSNs will need to be stealthy and reliable to facilitate future covert operations off an adversary’s coast.
In summary, advanced sensors, signal processing, communications, and C2 techniques are the keys to future distributed ASW sensor operations—and even though “it’s the sensor, stupid” is still axiomatic in ASW, “it’s the network, stupid” is equally true. Without a robust sensor network and stand-off weapons that can rapidly respond to moving ASW contact information, ASW will continue to earn its reputation as the “awfully slow warfare” area that ties up a lot of manned assets for incremental gains in a painful war of attrition.
7.3.2 ISR Shortfalls in Theater Air and Missile Defense and Potential Solutions
Theater Air and Missile Defense, excluding ballistic missiles for the moment, is highly developed in the Navy. Automated fire control and very tight timing with modern and emerging systems—such as Aegis with SPY-1(D)V and SM-2 Blocks IIIB and IV, Ship Self Defense System with Rolling Airframe Missile, and the new SPY-3 Multifunction Radar (MFR) with Enhanced NATO Sea Sparrow Missile—are able systems. The new Hawkeye 2000 with CEC and the developmental Naval Integrated Fire Control–Counter Air (NIFC-CA) network with next generation advanced Hawkeye, Aegis SM-6, CEC forward pass, and F/A-18 with Active Electronically Scanned Array (AESA) radar will provide over-the-horizon inland reach against cruise missiles.
The sensor network represented by CEC and eventually the joint Services Single Integrated Air Picture (SIAP) is a comprehensive means to monitor the air traffic in a theater. This sensor network can also provide some of the basis for close-air-support deconfliction.
Two shortcomings persist at the present time, however. First, for NIFC-CA there is not a function for the positive identification of long-range targets, to ensure that SM-6 does not engage a friendly or neutral aircraft or missile. Although CEC features composite identification as a fusion of Mark XII identifica-
tion friend or foe (IFF) tracking history, air lanes, and operator inputs from other sources, the long-range aircraft flying low out of IFF range through a valley may not register with a high-confidence identification from the present identification capability. However, the new, high-resolution capabilities of the AESA coupled with Advanced Hawkeye and F-18 forward-looking infrared sensors could be leveraged for automated target-identification processing. Further studies by Johns Hopkins University/Applied Physics Laboratory (JHU/APL) and the Massachusetts Institute of Technology (MIT) have indicated that networking these identification systems from different aspect angles can greatly enhance the probability of correct identification.2 Several platforms may be required. Research and development (R&D) and operations analysis for such a capability should be supported.
Finally, the interoperability issues of CEC with the Link 11 and 16 Tactical Data Links (TDLs) persist. The fundamental limitation to interoperability is error in the TDLs inherent with inadequate track sampling rates, reporting outages, and reporting lags for maneuvering targets. Whereas such prototypes as Shipboard Gridlock System/Automatic Correlation (SGS/AC) and Multiple Frequency Link (MFL) have been fielded, newer prototypes incorporating composite tracking of CEC, such as the Advanced Technology Program (ATP), have not been fielded. It is hoped that the present Joint Theater Air and Missile Defense Organization (JTAMDO) SIAP effort will lead to a comprehensive solution.
For theater and national ballistic missile defense, the networking of sensors from space, land, and sea coupled with unique sensor networking fusion is being investigated. For example, an earlier joint Navy/Ballistic Missile Defense Organization (BMDO) Concept Definition Study3 indicated that advanced extremely high frequency (AEHF) satellite communications with Defense Satellite Communications System (DSCS) backup could provide adequate connectivity for a track-to-track or even a CEC-style composite tracking network among ships, land sites, and C2 centers. This may, however, result in greater connectivity and bandwidth-allocation requirements for destroyers and cruisers than are anticipated in present Navy plans. Further, these earlier studies did not account for the potential overhead and connectivity options that an Internet Protocol (IP)-based Global Information Grid (GIG) with Transformational Satellites would imply. Studies are ongoing within the Missile Defense Agency (MDA), and Networks and Information Integration (NII) and MDA have established a dialogue.
7.3.3 ISR Shortfalls in Strike Warfare and Potential Solutions
Over the past 60 years, modern electronics and guidance technology have brought tremendous progress in the ability to place a weapon precisely on a ground target. Precision aerial bombing has reduced the number of bombs required to kill a ground target, from more than 1,000 bombs per target in World War II to 1.5 bombs per target in Operation Iraqi Freedom. Similar gains are also anticipated with the emerging technology of guided artillery shells, as typified by the enhanced-range guided munition (ERGM). Technological evolution, driven in large part by Moore’s law and the Global Positioning System (GPS), both enables the sensor technology to measure the target coordinates and enables the guidance technology to steer the bomb to the target. For example, national IMINT systems enable the precise geolocation of fixed targets for prosecution by weapons accurately guided by the GPS. Air-launched, laser-guided weapons enable precision strikes, even on moving targets. But targeting processes associated with national IMINT systems are too slow for relocatable targets and are vulnerable to the countermeasure of hiding, while laser-guided weapons put pilots at risk. So today it is relocatable, hiding and moving targets that challenge the nation’s strike capabilities in major combat operations.
Potential solutions to these shortfalls involve layered ISR sensing capabilities that in correlated aggregate provide persistent surveillance. Section 7.5 discusses several specific concepts for achieving the needed layering and persistence. A previous Naval Studies Board report, Network-Centric Naval Forces, addressed architectural trade-offs in a system to hit moving targets.4
Another realm among potential solutions is that of tasking and exploitation. Today the time required for sensors to respond to a commander’s tasking is typically too long for tactical utility; thus, when a deficiency or uncertainty in the ISR is recognized, the commander cannot correct the problem; that is, tasking is essentially open loop. Furthermore, commanders have few tools for recognizing deficiencies in the ISR picture—for example, seeing that certain areas have not been adequately searched. Also, ISR systems today produce a collection of information products from a disparate set of uncoordinated national, theater, and battleforce-organic sensors (synthetic aperture radar [SAR], EO, IR, SIGINT, ground moving target indicator [GMTI]). This varied array of sensors is capable of producing large numbers of reports, but unfortunately in a range of different formats. The potential of these sensors for saving knowledge is rarely achieved. Tactical commanders and their staffs typically have neither the skills nor the tools to recognize the relevance of these reports and to interpret them.
What commanders get today is represented in Figure 7.3. It can be characterized as data from large numbers of partially overlapping sensors, generating hun-
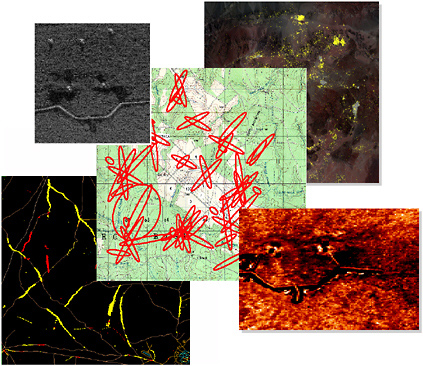
FIGURE 7.3 Sensor products of SAR, EO, IR, SIGINT, and GMTI for today’s systems are not integrated and provide only a fraction of their information potential. NOTE: SAR, synthetic aperture radar; EO, electro-optical; IR, infrared; SIGINT, signals intelligence; GMTI, ground moving target indicator.
dreds of reports and thousands of images per minute. These reports are not geospatially registered and are limited-field-of-view (“soda-straw”) sensor observations. Uncorrelated information from individual sensors typically results in both low probabilities of detecting and identifying targets and high false-alarm rates.
As the number of sensors, platforms, exploitation sites, and command-and-control nodes continues to grow, commanders and analysts will have an ever-increasing need to collect and process vast amounts of data over wide areas using a large number of disparate sensors and information-gathering sources. Current processes require significant human expertise and effort to accomplish these jobs. Sensor analysts are required to sift rapidly through large volumes of data pertaining to wide areas to assess friendly status and enemy situations. Today’s analysts are uniquely trained with specific skills for specific sensors. This stovepiped process produces reports in differing formats that require further manual analysis and interpretation prior to use by a force commander.5
The problem is further complicated by the decrease in the number of analysts and the fact that few are trained to perform multisensor analysis. All of these factors point to work flows and workloads being critical issues that could severely limit naval operations.
A recent example of the types of independent systems described here can be seen by looking at the Image Centric Surveillance used in Kosovo during the late 1990s. Exploitation was manual, a single sensor at a time, and typically took days to complete. Change detection was done by eye, pixel by pixel. There was no automatic multisensor georegistration.
Section 7.4.1 discusses a vision for tasking and exploitation and Section 7.5.1 addresses specific systems concepts consistent with this vision.
7.4 ISR ARCHITECTURE OVERVIEW
7.4.1 Fundamentals of ISR Architecture Design
As discussed in Chapter 3, an ISR architecture must be designed as part of an overall C4ISR combat-system architecture design. The design process for that overall architecture involves developing alternative architectures, performing trade-off studies using mission metrics to characterize these architectures, and selecting a baseline architecture.6 In the context of that overall architecture design, however, certain fundamentals apply specifically to the ISR component. This subsection addresses those fundamentals.
Balancing the Needs of Intelligence and Tactical Surveillance
The process of designing the ISR architecture must balance the different requirements of tactical surveillance and intelligence. The needs of the military and the intelligence communities overlap and require a balanced architecture to avoid compromising both missions. The competing needs of high resolution, persistence, wide-area surveillance, and dwell time, to name a few, can easily drive the cost of a single system to an unaffordable design.
As an example, consider the very challenging and limited use of airborne or space-based radars to measure target image information [I = I (f, t, P, X)] from long range. This measurement can yield a complex function of four independent variables (f: frequency, t: time, P: polarization, and X: spatial geometry). The intelligence objective is to maximize the knowledge of I (target image information) for any given target. This requires radar systems that have the following characteristics:
-
High-frequency microwaves to resolve target details better; today X band, and in the future expanding to Ku and Ka bands;
-
Multiple timescales (fast time = SAR image, slow time = state change);
-
Coherent change detection (state change in multidimensional [quantified attribute] space);
-
Full polarization radar imagery (to differentiate against clutter);
-
Very high spatial resolutions (1 inch, or 6 GHz bandwidth); and
-
Very high fidelity (dynamic range and signal-to-noise ratio) for precision technical measurements.
These requirements typically lead to very precise and expensive systems that can only be afforded in limited numbers. Furthermore, communications data rates may be a constraint.
The Navy’s tactical surveillance objective, by comparison, is to provide the required level of persistent dwell time. Typically this becomes an issue of quantity and affordability. A reasonable technical approach is to exploit a priori knowledge of the adversary and the background environment in order to maximize the surveillance, detection, and tracking of important targets. Prior knowledge can reduce the requirements regarding the frequency and fidelity of the persistent observations. Achieving surveillance, detection, and tracking of important targets requires a careful choice in radar frequency, balancing between the target detail needed for identification, better at high frequencies, and all-weather coverage, better at low frequencies. The optimum compromise appears to be in the 10 GHz to 14 GHz range. Tactical imaging modes can only have limited resolution (e.g., 1 ft to 10 ft), since they must observe a wide area in a short time.
With precise information on the detailed scattering from target features, future radar systems can improve the target detection, tracking, and identification by using matched filtering in the velocity, polarization, and spatial-range dimensions of the target. It is envisioned that the higher-frequency, more-precise intelligence systems will provide much of the a priori knowledge of background required for the matched filtering, in a synergistic fashion.
Allocating Requirements Among Surface, Airborne, and Space-Based Assets
Allocating requirements among airborne and space-based assets is fundamental to achieving an affordable ISR architecture. Figure 7.4 represents the system architecture trade-offs between high precision with low persistence and low precision with high persistence, showing how this balance can minimize cost and maximize synergy among medium-Earth-orbit (MEO), low-Earth-orbit (LEO), and air components in an ISR system-of-systems architecture. A layered architecture of MEO, LEO, and air systems can provide the required performance
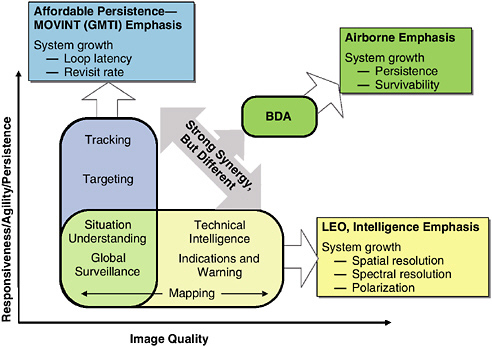
FIGURE 7.4 Surveillance and intelligence needs: an effective ISR architecture will parse the competing needs of resolution and revisiting in a balanced design. These needs are best addressed by a mixed medium-Earth-orbit (MEO) and low-Earth-orbit (LEO) architecture. NOTE: GMTI, ground moving target indicator; BDA, battle damage assessment; Intel, intelligence.
at the most affordable price. It will also yield a more survivable distributed system with the added benefit of growth flexibility or adaptability.
Since the cost to field systems that can cover the whole Image Quality–Persistence parameter space shown in Figure 7.4 is unaffordable, one needs to look at how to achieve virtual performance through the correlation and integration of the two or more systems in an architecture, thereby creating a networked system-of-systems, which, acting together, achieve performance beyond the sum of the systems. SAR ISR systems provide several simple examples of this envisioned synergy. First, as discussed above, high-resolution SAR is practical for identification, while low-resolution moving target indicator (MTI) is needed for tracking. Second, to counter an enemy’s denial and deception tactics, high-resolution SAR will counter spoofing, while low-resolution MTI, with its persistence, will counter an enemy’s moving under cover.
The difficult task of target identification tends to dictate the need to exploit all the radar scattering information that can be obtained—for example, by using full polarization GMTI and high-range-resolution GMTI. Future collection concepts, such as ultrahigh spatial resolution and vector measurement of target velocity via
multistatic range-range bilateration of GMTI radar data from two separate platforms, offer potential enhancements in target identification, location, and tracking and identification. These new opportunities will require target signals collected by using both space-based and airborne systems in bistatic radar geometries.
Applying the Appropriate Sensing Phenomenology
Above the sea surface, fundamental sensing and information needs for naval strike forces will require smart exploitation of the physical observables associated with the RF through the ultraviolet (UV) regions of the electromagnetic spectrum. This exploitation will be needed in order to gain sufficient information in the very difficult environments often associated with real-world conflicts. The range of sensor systems will include both traditional sensors, such as pulse-Doppler surveillance and tracking radar for airborne targets and EO and IR imaging for air and ground targets, but it will expand in the future to include hyperspectral imaging, tomographic SAR, and GMTI radar.
The naval mission needs that span the physical domains from space to air to surface to undersea are captured in Table 7.4. These mission needs, combined with the broad physical and phenomenological information needs required to make accurate and timely decisions, should drive the architectural choices the Navy will need to make in order to develop an affordable, effective, and balanced ISR system of systems.
Covering Space and Time
ISR architecture development must take into account the amount of information needed as a function of space and time. Figure 7.5 illustrates the concept with a notional, qualitative example for the strike mission. The capability of various ISR sensor platforms is mapped over the battlespace. A good architecture will provide layered coverage with sufficient overlap and density to achieve the desired level of understanding and awareness, given the expected effects of enemy action, weather, system reliability, and so on.
Deciding on and Providing for Volume of Data
A key consideration in ISR architecture design is the nature of the data supplied by different sensors and platforms. At a fundamental level, the volume of data provided by a sensor is one of its dominant characteristics. Data volume has a strong impact on both the communication of the data and the ability of an ISR architecture to integrate, interpret, and exploit ISR data. The dimensionality of the data has a strong effect on data volume. Table 7.5 gives some examples of data with different dimensionality, as may be produced by in situ and remote sensors.
TABLE 7.4 Naval ISR Sensing Needs: Key Capabilities Required by Naval Strike Forces and the Applicable Sensor Technologies
|
Required Capabilities for Sea Shield and Sea Strike |
Sensor/Modes |
|
Detect, track, and identify enemy tactical ballistic missiles (TBMs) inflight. |
Radar/airborne moving target indicator (AMTI) |
|
Detect, track, and identify enemy, aircraft, and cruise missiles. Carry out surveillance, tracking, and managing of naval aircraft. |
Radar/AMTI |
|
Monitor troop movements. |
Radar/GMTI |
|
Track groups of vehicles and individual time-critical targets. |
|
|
Estimate targeting “end game handover baskets.” |
|
|
Locate stationary vehicles and target sites. |
SAR imagery |
|
Assist with target identification and battle damage assessment. |
Change detection |
|
Provide WGS-84 precision aim points. |
EO imagery |
|
Identify targets (combat identification). |
IR imagery |
|
Provide battle damage assessment. |
Hyperspectral imagery |
|
Detect and localize TBM launches. |
IR (national systems), HALE, UAVs |
|
Interrogate and track cooperative aircraft. |
Radar/IFF |
|
Track and identify blue ground forces. |
RF tags |
|
Identify and locate emitters. |
SIGINT |
|
Intercept communications. |
ELINT, COMINT |
The various sensors discussed above make very different demands on communications links and data-analysis systems in terms of data rate and peak processing power.7 Figure 7.6 provides estimates of the data rates required for the transmission of some example data packages. The types of data packages range from a simple e-mail text message with about a hundred words, to a hyperspectral image that displays 500 spectral bands for each pixel. Note that this data rate can vary over eight orders of magnitude. Since communications systems are data-rate limited, at least until the era of the Transformational Communications Architecture (TCA), good architectural design must make appropriate decisions regarding the design and tasking of sensors and platforms in order to maximize the quality
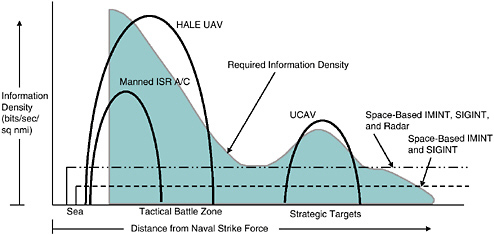
FIGURE 7.5 A notional depiction of naval strike force information needs and some ISR platform capabilities as a function of distance for the strike mission. NOTE: HALE UAV, high-altitude, low-endurance unmanned aerial vehicle; ISR A/C, intelligence, surveillance, and reconnaissance aircraft; UCAV, unmanned combat air vehicle; IMINT, image intelligence; SIGINT, signals intelligence. SOURCE: Adapted from information provided to the committee, December 2004, by Lee Upton, Massachusetts Institute of Technology, Lincoln Laboratory.
and value of the ISR information. Onboard processing for image formation and reactive tasking analysis will be required for future space-based and airborne ISR systems and will drive technology to new levels of processing performance and reduced power consumption (>100 billion operations per watt).
TABLE 7.5 Examples of ISR Data with Different Dimensionality
|
Dimensionality of Data |
In Situ Example |
Remote Example |
|
One-dimensional |
Trip wire, tank tread pressure sensor |
Radar or lidar altimeter |
|
Two-dimensional |
Horizontal velocity vector at a point |
Photographic image, SAR image |
|
Three-dimensional |
Horizontal and vertical velocity vector at a point |
Moving target indicator (MTI) radar map; hyperspectral imaging spectrometer |
|
Four-dimensional |
Time history of three-dimensional data |
Time sequences of MTI maps |
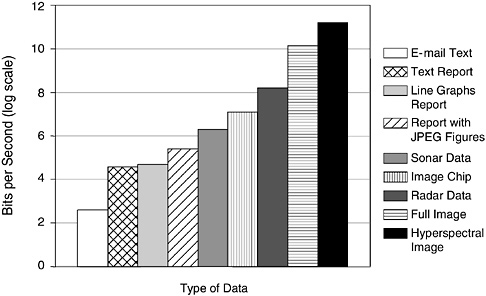
FIGURE 7.6 Estimated data rates required for transmitting specific data types in a 10 second transmission. The vertical axis is the data rate in bits per second (on a log scale): for example, 2 implies 100 bits per second, and 6 implies 1 megabit per second.
7.4.2 Promising Architectural-Level Concepts
This subsection discusses potential solutions to the shortfalls addressed in Section 7.3 that apply primarily to architectural design, as opposed to the design of specific sensors, platforms, or exploitation systems.
Closed-Loop Tasking, Collection, and Exploitation
The ISR system of tasking, collection, integration, interpretation, and exploitation is viewed as a system of systems. This system of systems should function as a closed-loop process in order to provide the ISR information needed to support a commander’s intent. Tomorrow’s systems should have the goal of delivering what commanders want when they want it—which means giving commanders a stronger degree of control over ISR collection, tools to assess ISR adequacy, and an ISR product that provides timely situational understanding. Sensor products should be integrated for full information value and the results presented in a low-burden (or quickly understandable) form to permit faster reaction. Sensor coverage should be comprehensive, wide-area, and controllable. Target locations should be precisely georegistered. The information should be captured in a dynamically updated, georeferenced database, and that database should be of low burden to the warfighter. Threat information should be cast in a hierarchical
fashion, with the most critical, time-sensitive information sent in the most compact fashion so as to reach even communications-disadvantaged users quickly.
Nontraditional ISR Assets in Network-Centric Operations
The advent of network-centric operations presents an opportunity to use as ISR assets platforms that will be present in mission execution. The Navy can leverage its investments in F/A-18 and F-35 sensors and communications to interlace the surveillance and tracking roles of an ISR asset with the roles of a strike asset. This opportunity is enabled by the improved sensor capability of modern AESA radars, which are capable of air-to-air modes as well as air-to-ground imaging and GMTI tracking modes. The Navy should explore the concept of networking F-18 E/F and F-35 platforms together to provide a persistent surveillance dwell time during a strike engagement. This use of aircraft over targets for ISR has high potential, since it exploits the presence of strike assets that have already penetrated an adversary’s air defenses and have a great positional advantage. The committee calculates that three strike packages of four aircraft each, using AESA radars, can map terrain at a rate equal to the rate at which two and one half Global Hawk UAVs could accomplish the task.
Operational Movement Intelligence
The committee believes that the Navy should create, as a key component in Navy ISR architecture, movement intelligence, or MOVINT, as a new ISR source and method that could provide significant benefits in future engagements. MOVINT exploits movement and change on a battlefield to provide important indications of an adversary’s activity. The surveillance systems designed to detect these changes provide a coarse filter that directs attention to specific locations and activities for more-focused observation. This coarse filter limits the energy expended by scarce ISR resources in looking at regions where no activity is occurring, increasing chances that these resources will be looking at the right place at the right time. Additionally, movement by an adversary is a powerful denial and deception method that must be countered.
The first steps for the Navy to take in order to create a MOVINT capability are to exploit motion and change on the battlefield by architecting a system of collection assets working in a highly integrated cross-cueing and tasking network. This network of sensors, in which one sensor’s observation of motion cues the next level of detailed observation in a cascading fashion across the network of systems, provides an efficient observation of an adversary for understanding the adversary’s actions. This understanding will be possible only if one studies an adversary’s habits on the battlefield and identifies statistical norms that underlie the enemy’s daily activity.
This information-rich environment requires the development of automated
exploitation tools that key on movement and change and allow human attention to focus on events and activity of potential significance. This environment requires new concepts that look at changes in a scene, not on a pixel-by-pixel basis but rather as a whole—for example, by overlays providing detection of event-level change.
The key enabler of MOVINT capability is the emergence of airborne and space-based radar for persistent ISR coverage and its unique combination of high-resolution SAR and high-range-resolution ground moving target indicator (HRR-GMTI) radar technology. This capability allows one to measure movement and change over wide areas in an efficient manner and then to focus imagery on the important changes in a region. Automated exploitation systems are required to digest sensor information and extract significant changes and to manage the large increase in data and necessary background information, for example, Precision Digital Terrain Elevation Data. By adopting and employing a surveillance capability to understand and track an adversary’s changes on the battlefield, the Navy can maximize the utility of its strike forces.
Some may argue that the methods described above should not be called intelligence in the same way that image intelligence or signals intelligence are. Consider, however, measurement and signatures intelligence, MASINT. The committee sees a strong parallel between MOVINT and MASINT. Both represent an ensemble of technologies and approaches aimed at determining some characteristic of a threat. MASINT aims at determining the threat’s physical attributes, while MOVINT aims at determining its movement. The committee believes that the methods described above could be a powerful tool which, if fully developed, would deserve to be called an “INT.”
Unmanned Sensor Platforms
Emerging unmanned undersea, airborne, and space-based systems offer the greatest potential leverage for the Navy to address the shortfalls discussed in Section 7.3. In the committee’s view, the Navy has been slow to exploit unmanned assets, with the exception of unmanned undersea vehicles. Key opportunities include the leveraging of Air Force investments in the Global Hawk and space-based radar (SBR) and preparing to transition the Defense Advanced Research Projects Agency’s (DARPA’s) Joint-Unmanned Combat Air System (J-UCAS) demonstration into an acquisition program.
A recent Naval Studies Board report, Autonomous Vehicles in Support of Naval Operations,8 presents an extended discussion of opportunities for the Naval Services to use unmanned vehicles for ISR and other purposes.
Reach-back
The committee is heartened by the Navy’s embrace of reach-back, a core requirement for DCGS scalability. The Combined Fleet Forces Command reported to the committee on studies it has recently completed which show that reach-back can reduce costs to the Navy and maintain competencies of imagery analysts. Reach-back can also enable the Navy to participate in distributed, multi-Service efforts to support theater commanders in coping with the flood of information available from current sensors and systems under development. Nevertheless, the committee believes that it can attribute differences seen between USAF and Navy implementations of DCGS to a much greater USAF reliance on reach-back. In addition, while reach-back can greatly improve the efficiency of manual exploitation and fusion, improved automation is still needed to cope with all of the information becoming available.
A key issue in the integration and interpretation of ISR information is the placement of the intelligence staff personnel, that is, local centers versus reach-back. This issue deserves serious trade-off studies for a variety of applications from carriers to Marine Corps platoons. Critical requirements for the delivery of ISR information to commanders are completeness, timeliness, accuracy, and robustness. In architectural trade-off studies, some important factors are the following:
-
Communications capacity. Can reach-back transfer the data needed in a timely manner via the GIG or other methods?
-
Risk of connection loss. Reach-back fails if the communications link fails.
-
Effective transfer of a commander’s intent. This is needed both in reach-back queries and in response to the request.
-
Possible loss of forward personnel owing to enemy action.
-
Cost-effectiveness.
Personnel factors play an important role in the reach-back versus local staff trade-off. It is essential that personnel involved in ISR information integration and interpretation be fully and personally engaged. Local ownership of intelligent resources promotes responsibility in the band-of-brothers tradition. This commitment and teamwork must be maintained in reach-back situations.
The naval forces have a long tradition of not relying on reach-back. Thus, the committee suggests as an initial architectural design approach that reach-back be the default method: that is, that proponents of on-site analysis have the burden of proving that on-site analysis is superior to reach-back for a particular ISR product.
7.5 FUTURE OPPORTUNITIES FOR ENHANCING ISR
This section identifies some promising emerging opportunities for improving the ISR capabilities of future naval strike groups, either through Navy devel-
opment programs or through programs that might be sponsored by other U.S. government agencies. ISR tasking and data-exploitation systems are considered first, followed by underwater unattended sensor networks, airborne platforms, and, finally, new space-based system opportunities.
7.5.1 Concepts for Enhancing Tasking and Exploitation
The earlier subsection entitled “Closed-Loop Tasking, Collection, and Exploitation” presented a vision for future ISR tasking and exploitation based on a view that the system of systems that carries out tasking, collection, integration, interpretation, and exploitation should function as a closed-loop process to provide ISR information needed to support a commander’s intent. Central to the vision were the providing of tactical commanders with a stronger ability to control ISR sensors, tools to assess the adequacy of that commander’s ISR picture, and fused, multisource data. This subsection discusses several programs that have demonstrated technologies consistent with that vision. While each of the programs was of significant size and included field demonstrations, none has a secure transition path to an acquisition program at this writing.
DARPA’s ISR Tasking and Exploitation Programs
DARPA has been conducting a series of programs developing technologies for ISR tasking and exploitation. Its Advanced ISR Management (AIM) program developed technology for coordinated collection planning for a heterogeneous mix of airborne and space-based ISR platforms. The AIM algorithms route the airborne platforms and schedule the sensors of both classes of platforms in order to optimize the accomplishment of prioritized collection tasks. The AIM program demonstrated the ability to automatically develop a 24 hour collection plan for a theater-scale scenario (thousands of collection tasks for tens of collection platforms) in 10 minutes. Moreover, by finely coordinating the routes and schedules of the platforms, the number of collection tasks successfully performed increased by over 40 percent compared with the number performed under a conventional, stovepiped plan in which collection tasks were partitioned between platforms prior to plan development.
DARPA’s Dynamic Database (DDB) program developed technology to convert large volumes of space-based and airborne multisensor data efficiently into actionable information for tactical commanders. The DDB demonstration dealt with the problem of developing and maintaining a surveillance picture of moving ground targets in a brigade-size area (nominally 30 km × 30 km). Typically such an area contains thousands of moving objects. The DDB goal was to create situational awareness of the battlespace, including location, kinematics, tracks, and identifications. As envisioned, the DDB would provide the automation required to translate the relevant data from a sensor perspective to a tactical perspective—that is, to a map-based view of all objects in the battlespace.
The DARPA Dynamic Tactical Targeting (DTT) program is continuing the technology development begun under the DDB and AIM programs and is integrating exploitation with ISR collection management. Figure 7.7 displays the new closed-loop architecture that can be developed from these R&D efforts and which can form the basis for an automated exploitation process.
A closed-loop tasking-exploitation-tasking ISR information system learns from its continuous data accumulation over multiple observations, accruing and assessing evidence to determine if further tasking is needed to resolve residual target ambiguities.
If the vision of persistent surveillance is achieved, the amount of information that can be brought to bear can greatly improve the nation’s warfighting capabilities, but that promise can only be achieved if the information can be managed through closed-loop, automated systems. Figure 7.8 shows what is possible. A system such as that shown in Figure 7.8 cannot cope with the enormous amounts of data involved and operate in a timely manner without the extensive use of automated systems.
Global Net Centric Surveillance and Targeting
Global Net Centric Surveillance and Targeting (GNCST) is a prototyping effort within the Assistant Secretary of Defense for Networks and Information Integration (ASD[NII]) Horizontal Fusion (HF) portfolio for demonstrating the integration of warfighting capabilities into the GIG architecture. It is highly classified and is sponsored by the National Geospatial-Intelligence Agency (NGA). Fifteen organizations have been contributing to an effort to produce the best set of algorithms and processes for information fusion. The primary premise of the effort is to apply automated upstream fusion of signals from national assets to allow earlier association of emitting and non-emitting target signatures. Theory and simulations indicate that it is possible to have higher detection probability while maintaining false-alarm control and high-fidelity identification. In the first HF Quantum Leap experiments, the prototype processes of GNCST successfully demonstrated these attributes. With the elimination of all elements of the HF portfolio except those projects directly useful to the Iraq and Afghanistan campaigns, GNCST is in a hiatus, with the NGA, the NRO, and the Air Force exploring a transition to an acquisition program.
Joint Targeting and Attack Assessment Capability
Joint Targeting and Attack Assessment Capability (JTAAC) is a prototyping effort funded by the Naval Sea Systems Command (NAVSEA) to significantly reduce the time line for time-critical strike. It features optimized tasking and real-time sensor pointing of airborne ISR platforms (to date the U-2 and Global Hawk) to maximize the probability of TEL detection and identification given an
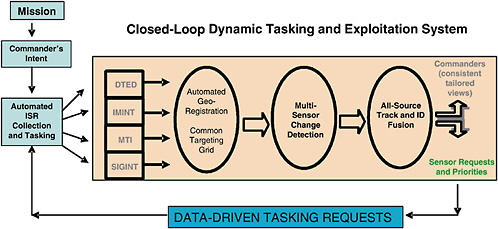
FIGURE 7.7 A modern multi-intelligence fusion database architecture using spatial georegistration of all source data can act as the engine for an iterative, closed-loop tasking-exploitation-tasking ISR information system. NOTE: ISR, intelligence, surveillance, and reconnaissance; DTED, digital terrain elevation data; IMINT, image intelligence; MTI, moving target indicator; SIGINT, signals intelligence. SOURCE: Courtesy of the Defense Advanced Research Projects Agency.
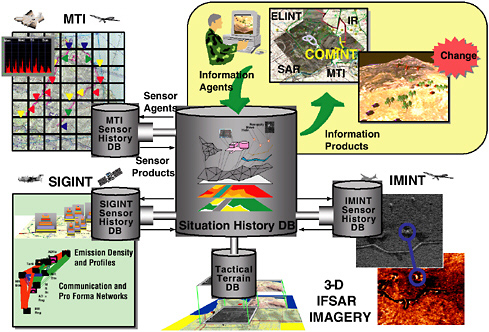
FIGURE 7.8 Automated closed-loop dynamic tasking and exploitation system: conceptual view of an automated system that manages collection and integration of data by using the data themselves to determine if more information should be collected against targets in the database. NOTE: MTI, moving target indicator; DB, database; SIGINT, signals intelligence; ELINT, electronic intelligence; IR, infrared; SAR, synthetic aperture radar; COMINT, communications intelligence; IMINT, image intelligence; IFSAR, interferometric synthetic aperture radar. SOURCE: Courtesy of the Defense Advanced Research Projects Agency.
intelligence cue (such as from GNCST). It also features automated image processing (highly detailed template matching) at optical, infrared, and SAR wavelengths to allow the cueing of image analysts to make a final decision. Finally, it features an automatic target and strike-asset pairing decision aid for timely assignment of air strike and deconfliction of the surrounding battlespace. The prototype is being considered by the Navy and Air Force for further, operationally realistic testing. Given favorable disposition of shooters, time line reductions have brought the kill chain well under the time line estimated to be needed for responsive strike against such targets. JTAAC is also being considered for the near-real-time detection and identification of noncombatant objects of interest. It is recognized that other types of vehicles and installations may be of interest besides TELs, and that with sensors of adequate resolution the JTAAC algorithms could facilitate (i.e., cue) an analyst for these broader objects of interest.
7.5.2 A Concept for Undersea Surveillance: An Autonomous Sensor Network Deployed by LMRS
A network of distributed autonomous underwater sensors (AUSs) could be an important component in a network of sensors for detecting and tracking diesel submarines. However, AUSs are hard to put in place, maintain, and retrieve data from. The committee believes that a unique opportunity may emerge if the Navy succeeds in developing and deploying the Long Range Mine Reconnaissance System (LMRS) currently under advanced development. It may be possible to use the LMRS as the critical infrastructure element to deploy the sensors precisely and covertly, to provide any routine maintenance, and to connect the sensor network to the outside world.
A network of distributed autonomous underwater sensors has the advantages of large-area coverage, covert operation, and tolerance of individual node failures. Such a sensor network allows passive acoustic surveillance, distributed active surveillance, and multistatic operation with other collection assets to counter such threats as air-independent diesel submarines.
The LMRS is a clandestine mine reconnaissance system that employs autonomous underwater vehicles capable of launch from and recovery by attack submarines. In support of proposed amphibious operations, other battle group operations, and for safe ship transit around mined waters, the LMRS will provide an early, rapid, accurate means of surveying potential minefields. The LMRS involves the capability of ejecting autonomous underwater vehicles from a submarine and of recovering the vehicles after they have accomplished a mission.
The existing LMRS is an autonomous underwater system housed in a 21 in. diameter, 20 ft long vehicle that can be deployed by and recovered from attack submarine torpedo tubes using a telescoping recovery arm. This unmanned underwater vehicle can operate for 40 to 50 hours at depths to 1,500 ft and speeds to 7 knots, using high-energy-density lithium batteries. A typical LMRS mission begins with launch from a torpedo tube, continues with mapping of seafloor and minelike objects in preselected areas, and ends with recovery by the mother submarine (rendezvous, docking, and stowage).
The nodes in this Autonomous Underwater Sensor Network (AUSN) would be linked by optical fibers and would use the LMRS to provide the connection to the remote surveillance asset. The AUSN array would allow the collection, archiving, processing, and interpretation of data from an array’s field of regard. With the remote re-access possibility, the AUSN could lie dormant for long periods (perhaps operating in a low-power mode or sleep mode) and then be reactivated at intervals by a visiting LMRS for data collection, command, or active operation.
This array of autonomous sensors would be deployed at selected locations to collect acoustic information in a variety of modes on command, on schedule, or as triggered by observed signals. The LMRS might survey the area to be monitored before sensor deployment, allowing the actual seafloor features to be
mapped and the effects of those features taken into consideration on the sensor field’s performance. It is envisioned that the sensor positions are known and that they are put in place with sufficient precision that they can be operated as a phased array and revisited at a later time.
The concept of operations is to have sensors and interconnecting fiber optics remain in place in a low-power observational mode after deployment. At intervals the array would be interrogated or commanded by an LMRS that connects to it via a fiber-optic connection node, perhaps tens of kilometers from the array. The LMRS could transmit the array data to the outside world in any of several ways. For example, it could connect by optical fiber link to a buoy on the ocean surface that houses an RF satellite link. Alternatively it could transmit via acoustic or optical fiber link to its mother submarine.
One example application would be the formation of acoustic images of the ocean above the array. The collection and archiving of raw acoustic data on a continuous basis would be limited, probably occurring for periods of no more than minutes to hours. However, long-term observation could be done on a sampling basis with the storage only of images, not raw data. The goal would be to process raw acoustic data to form a passive acoustic image using interferometric imaging techniques and then to store the image, discarding raw data as necessary. By interconnecting the nodes, the data for forming the acoustic image—namely, the time-averaged mutual coherence function between pairs of sensors—could be retained, while the raw data were not. The acoustic images would give a snapshot of the spatial distribution of acoustic sources with high resolution.
Another application would be to have the network operate in an active mode as a phased array to form a narrow beam for target illumination. The LMRS and/or mother submarine could then operate in a quiet, bistatic sonar mode to detect, locate, and identify a possible target. Thus, the LMRS or submarine would remain silent and clandestine, and the emitter would be so widely distributed as to be difficult to attack.
7.5.3 Concepts for Future Airborne Surveillance
The goal of persistent surveillance will be difficult to achieve for the strike mission. The committee believes that, in addition to greater access to existing and planned airborne ISR assets, the Navy will require new platforms with new capabilities. This subsection presents a number of ideas for such platforms.
Organic Unmanned Airborne Surveillance with Inland Reach
The committee believes that achieving persistent surveillance will at times require reliance on organic assets. Especially in the face of a determined, capable adversary, it will be difficult to maintain airborne surveillance deep inland, and organic assets may be the best solution for this problem. A previous Naval Stud-

FIGURE 7.9 Conceptual unmanned combat air vehicle. SOURCE: Courtesy of Defense Advanced Research Projects Agency.
ies Board report, Autonomous Vehicles in Support of Naval Operations,9 discussed advantages of organic assets for ISR. The next subsections discuss opportunities for organic airborne surveillance with inland reach for carrier strike groups and expeditionary strike groups. Figure 7.9 shows a conceptual unmanned combat air vehicle on an aircraft carrier.
Joint Unmanned Combat Air System. A promising prospect for carrier strike groups is the Joint Unmanned Combat Air System. The J-UCAS program is demonstrating the technical feasibility, military utility, and operational value of networked, high-performance, weaponized, unmanned air vehicle systems for persistent surveillance and reconnaissance missions, in conjunction with missions for the suppression of enemy air defenses, strike missions, and electronic attack missions. See Figure 7.9.
Based on the success of the X-45A and X-47A aircraft, both the Boeing Corporation and the Northrop Grumman Corporation are developing multisensor air vehicles in the 40,000 lb range, with performance objectives of 1,300 nmi
combat radius, 2 hours’ persistence at 1,000 nmi, and 4,500 lb of weapons and payload capacity. These vehicles will more closely represent the envisioned operational systems, to include two full weapons bays and the incorporation of low-observable technologies.
Currently under design, the X-45C and X-47B demonstrators are scheduled to commence an operational assessment in the last quarter of calendar year 2007 that extends to the end of the current decade and beyond, depending on development progress and feedback from the operational community.
VTOL or STOVL Concepts for ESGs. The advent of manned V-22 tilt-rotor VTOL and F-35 STOVL aircraft in expeditionary strike groups (ESGs) suggests the possibility of the future development of unmanned vertical-takeoff-and-landing (VTOL) and short-takeoff-and-vertical landing (STOVL) craft to provide airborne ISR for ESGs. The committee is not aware of any flight vehicles, even in a prototype stage, that can meet the endurance and inland-reach requirements that the committee believes are necessary. The Bell Eagle Eye tilt-rotor VTOL tactical unmanned aerial vehicle (VTUAV) perhaps comes closest to meeting other requirements, but it falls short of the needed range and endurance.
Ultralong-Endurance Airborne ISR Collectors
As discussed earlier in this chapter, the value of persistence for providing information on continuity of movement and contributing to the understanding of an enemy situation cannot be overstated. For surface-based sensors, persistence has been regularly employed in surveillance-system architectures, and the ability to replay a sequence of images or measurements has provided critical cues to help unfold “ground truth.” Until recently, the technical ability to achieve that level of persistence for airborne and space-based systems has been impossible or unaffordable. Today, the emerging technology of hydrogen-powered aircraft and airships, new lighter and stronger materials, and the ever-shrinking size, weight, and power required for the surveillance payloads enabled by the evolution of Moore’s law and microelectronic systems now make these persistent surveillance systems a possibility.
A few key applications that would benefit from a persistent high-altitude or “sky hook” platform able to carry capable sensor payloads to provide timely and accurate information on an adversary’s current actions are as follows:
-
Picket fence or trip-wire surveillance of a key area at sea or on land to alert and then focus surveillance to track changes,
-
Ballistic-missile-state vector (position, velocity, and heading) determination at rocket motor burnout to enable an Aegis radar to acquire the missile and guide an interceptor to it, and
-
Tracking ships at sea carrying weapons of mass destruction (WMD).
These critical surveillance applications can provide high-leverage knowledge that acts as a force multiplier for both defensive and offensive missions.
Today, there are three competing approaches to achieving ultralong-endurance persistent surveillance: satellites; high-altitude, low-endurance unmanned aerial vehicles (HALE UAVs); and high-altitude airships. The first two have a proven track record, but current systems suffer in some key areas of performance. LEO satellites provide the core capability in many key metrics, but they are constrained in achieving long periods of dwell time or contiguous coverage owing to their Keplerian orbits, which only allow approximately 5 to 10 minutes of coverage per orbital pass. Depending on orbital altitude, constellations of 10 or more satellites are needed to achieve reasonable continuity, and the development and acquisition costs are large. Satellites have demonstrated greater than 10 to 15 year mission life,10 and their resultant life-cycle costs can now be made attractive with the right combination of architecture, technology, and concepts of operation. UAVs, by contrast, cost less for development and acquisition but require airbases near the regions of interest and have high operational costs. In recent years, several defense companies have been exploring HALE airships as an alternative with the promise of lower cost.11
High-Altitude, Long-Endurance UAVs. New opportunities in ultralong endurance, defined as longer than 5 days, will enable new levels of performance in the airborne segment. Today, the Global Hawk offers up to 30 hours of endurance; it is most effective when its airbases are within 500 nmi of the region of interest. Multiple orbits of Global Hawks using three Global Hawks per orbit can provide coverage 24 hours per day, 7 days per week at a rate of 40,000 nmi2 per day at 1 meter resolution. Nearly the entire land area of Earth can be covered from just one airbase using two UAVs with 10 day endurance. Long-endurance airships can show similar benefits owing to their promised endurance but will suffer longer deployment times because of slow velocity.
Next-generation, ultra-HALE UAVs currently on the drawing boards promise to achieve 7 to 14 days’ endurance, carrying payloads comparable to that of today’s Global Hawk. Ultra-HALE UAVs require a very efficient power plant and weight-efficient fuel. One approach is a hydrogen-powered internal combustion engine with a liquid hydrogen fuel tank.
Ultra-HALE UAVs were pioneered by DARPA’s Condor UAV, which achieved the altitude endurance record in the mid-1980s. A prototypical ultra-HALE UAV can be characterized by its very long (200 ft or greater) wings.
An important consideration in motivating next-generation UAV development is the life-cycle costs associated with a UAV, driven largely by the operational costs once the UAV is fielded. It is estimated that, compared to a 30 hour endurance UAV, a 10 day endurance UAV could reduce this cost by a factor of six.
Lighter-Than-Air Stratospheric Platforms. Several ideas are emerging for near-space platforms that are lighter than air (LTA) and may be able to maintain position in the stratosphere, at 65,000 to 100,000 ft altitude. Having platforms in the stratosphere would allow for wider coverage than can be achieved by lower-elevation winged aircraft, better resolution than can be provided by satellites in geosynchronous orbit, and much longer persistence than is possible with lower-orbiting spacecraft, especially if the LTA craft could be deployed in numbers for coverage overlap with station-keeping over days or weeks. A challenge for this class of systems is that of overcoming winds at northern latitudes in the winter months and being available a sufficiently high percentage of the time (e.g., 98 percent).
Lockheed Martin was developing a large inhabited airship for 70,000 ft altitude for MDA to detect imminent launches and to provide targeting for boost-phase interception12 until the program was recently canceled as an Advanced Concept Technology Demonstration because of the immaturity of the technology. New Mexico State University has originated a flying-wing concept that maneuvers through upper-atmospheric wind currents to keep on station. A recent Aviation Week and Space Technology article discloses a JHU/APL concept called High Altitude Reconnaissance Vehicle (HARVe)—the HARVe could be launched in a packed state in a Tomahawk missile airframe from a ship or aircraft and within hours deploy into an LTA propeller-driven platform at 70,000 to 100,000 ft.13 This would allow a Navy strike group to carry its own deployable (and expendable or recoverable) ISR platforms in numbers to complement organic and national winged airborne ISR assets. It is clear that there are many technological challenges to be overcome before this technology can be fielded and proven useful, but the idea of having a long-endurance sky hook is motivating.14
7.5.4 Space-Based Radar and Its Potential Application to Naval ISR
During the Cold War, the Navy had a strong interest in active space-based radar (SBR) systems for the surveillance and targeting of Soviet combatant ships. It developed several concepts such as Clipper Bow and the Integrated Tactical Surveillance System. None of these was fielded, however.
The committee believes that SBR systems today may present the Navy with a new opportunity. Technology now permits SBR systems capable of SAR imagery and GMTI surveillance, making them useful for a variety of land and maritime surveillance roles and therefore making them of interest to all the Services.
The role that an SBR system can fill in an integrated system-of-systems surveillance system is both broad and critical. SBR systems can provide unrestricted access to every corner of the globe, at any time of day and in any weather. With good system design, a constellation of SBR satellites can provide a high level of persistence over a significant portion of any theater of engagement. This system’s unique bird’s-eye view is unparalleled in both reach and in diversity of viewing geometry. One such design, based on a LEO constellation of affordable satellites (estimated by DARPA at $100 million per satellite), called Discoverer II, was under R&D in the late 1990s. Congress canceled the Discoverer II project in 2000. However, it gave $30 million to the National Reconnaissance Office to pursue enabling technologies for the concept.
The measure of any wide-area surveillance system is its ability to survey a large region quickly and to uncover clues to an adversary’s forces and intent. Section 7.4 discussed the trade-off between coverage and resolution. SBR achieves the needed balance through the use of different modes. Figure 7.10 shows the relative collection area for a space-based radar system. It can be seen that wide-area collection requires either very low resolution (>6 m) or a mode that employs target motion as the prefilter to focus further attention. SBR has a unique ability to track objects on the ground through their move-stop-move cycle, using GMTI while the object is in motion and SAR when it is not.
Figure 7.11 shows the future potential of coherent change detection technology applied to SBR. Figure 7.12 examines a scenario of maritime surveillance and tracking of ships in the Persian Gulf and compares SBR performance with that of manned surveillance assets (e.g., JSTARS) and unmanned airborne systems (e.g., Global Hawk). The analytical results show SBR’s utility in the metrics of time to survey an entire area and the number of assets needed to track a single ship.
The committee believes that the Navy should investigate the potential applicability of SBR in a robust ISR architecture for naval strike groups.15
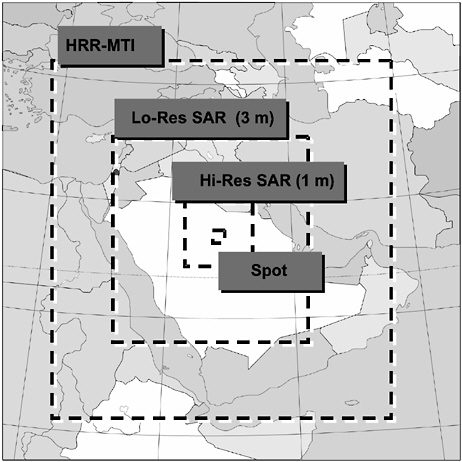
FIGURE 7.10 Twenty-four-satellite area coverage per hour per theater: comparison of the coverage area of several space-based radar sensor modes and resolutions. NOTE: HRR-MTI, high-range-resolution moving target indicator; SAR, synthetic aperture radar; Hi-Res, high resolution. SOURCE: Courtesy of the Defense Advanced Research Projects Agency.
7.6 FINDINGS AND RECOMMENDATIONS
The ISR capabilities of naval strike groups are provided by a host of naval, joint, and national sensor systems in space-based, airborne, surface, and subsurface platforms, and by a number of ground- and ship-based systems for the tasking of sensors and exploitation of sensor data.
Finding: The current ISR capabilities of naval strike groups have a shortfall in persistent ground and sea-surface surveillance. Navy and DOD programs in progress will improve these capabilities significantly but will still leave gaps.
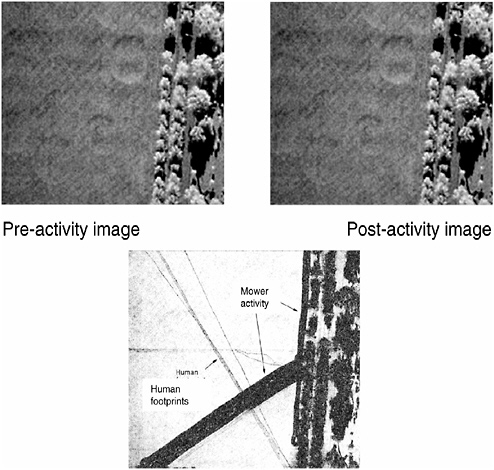
FIGURE 7.11 Coherent change detection (CCD) map with original reference synthetic aperture radar (SAR) pre- and post-activity activity. The CCD map was taken a short time after the reference image. Note the detection and progression of human footprints and mower activity (Ku band, 4 in. resolution). Future space-based radar imagery could provide new capabilities through CCD to monitor an adversary’s activity with new levels of sensitivity. SOURCE: Courtesy of Sandia National Laboratories.
The nation’s ground surveillance collection capability today is constituted primarily of space-based and airborne IMINT, SIGINT, and radar (SAR/MTI), with specific platforms ranging from national assets through manned airborne platform (e.g., JSTARS) and UAV (e.g., Predator) sensors. With these sensors, the military has demonstrated the capability to strike fixed ground targets reliably, precisely, and with little risk to U.S. or allied forces. The nation’s adversaries have recognized the vulnerability of their fixed assets, and so today it is relocatable, hiding, and moving targets that challenge the nation’s strike capabilities in major combat operations.
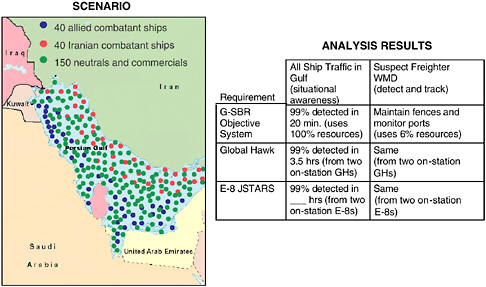
FIGURE 7.12 Maritime surveillance, tracking, and targeting: modeling of maritime surveillance for a space-based radar system and contrasting performance of Global Hawk unmanned aerial vehicle and Joint Surveillance Target Attack Radar System (JSTARS). SOURCE: Courtesy of the Defense Advanced Research Projects Agency.
The Naval Services contribute significantly to the nation’s strike capability, and their ability to sustain presence in-theater is an advantage. However, the relatively few collection platforms organic to naval strike groups, especially ESGs, and the shortfalls in the groups’ abilities to connect to and process data from joint and national systems limit the effectiveness of ESGs against relocatable, hiding, and moving targets.
Recommendation: The Chief of Naval Operations and the Commandant of the Marine Corps, should (1) continue their support of planned ISR programs, (2) increase investment in the development of unmanned air platforms, (3) leverage the Space-Based Radar program, and (4) tap the potential of networked strike aircraft for ISR.
The Naval Services should continue their development of DCGS-N as a means to improve their access to joint and national systems and leverage the nation’s planned investments in the Future Imagery Architecture and future SIGINT improvements, as well as Global Hawk and Predator UAVs.
The Navy should continue its plans to develop the Broad Area Maritime Surveillance (BAMS) UAV, Multimission Maritime Aircraft, and Aerial Common Sensor. These platforms will provide information to enhance ground and
sea-surface pictures significantly. Airborne ISR investments should be protected as aviation budgets are strained in future years to pay for the simultaneous production of multiple tactical aircraft.
The Navy should increase its investment in organic unmanned air platforms for naval strike groups. The Navy should prepare to transition into development a carrier-based unmanned combat air vehicle (UCAV) from the current J-UCAS demonstration program, and it should explore STOVL or VTOL UAV options for use in an ESG. The Navy should conduct research and experimentation on innovative concepts for ground-launched airborne platforms for persistent surveillance, such as ultra-HALE UAVs and LTA airships.
A space-based radar (SBR) can contribute to both the single integrated land picture needed by all the Services and the single integrated sea-surface picture that the Naval Services uniquely require. The Navy should participate very actively in the DOD’s SBR program, ensuring that naval requirements for land and sea surveillance are factored into the program’s cost-effectiveness design trade-offs.
Naval and joint strike aircraft that penetrate defenses and deliver weapons represent an important resource for ISR. Their AESA radars and EO/IR sensors could provide close-in images of the target area; when networked together, these radars and sensors may provide a unique and valuable perspective of the battlefield.
MOVINT tracks enemy movement from one place to another and exploits change on the battlefield to provide important indications of an enemy’s activity. The Navy should assess the potential benefits of using a sensor mix with significant airborne and space-based radar capability (including MTI), together with automated exploitation systems for vehicle tracking and change detection, to implement the MOVINT concept.
Finding: Current ISR capabilities of naval strike groups have a shortfall in sensor tasking and data exploitation. The DCGS-N now under development will improve this capability significantly; it is the natural host in the future for additional needed improvements over and above the current program, particularly improvements involving automated data processing and interpretation. To distribute its strike groups more widely around the globe, the Navy will have to rely more frequently on reach-back, which DCGS-N will also facilitate.
Today, the time required for sensors to respond to a commander’s tasking is typically too long for tactical utility, and the commander has few tools for recognizing deficiencies in the tactical picture. Also, ISR systems today produce a collection of information products from a disparate set of uncoordinated national, theater, and naval sensors. The potential knowledge to be gained from these sensors is rarely achieved. Tactical commanders and their staffs have neither the numbers, the skills, nor the tools to recognize the relevance of these reports and interpret them.
The DCGS-N will greatly enhance future naval strike operations. It com-
bines C2 systems, ground stations for UAVs and manned aircraft, IMINT and SIGINT dissemination and processing capabilities, and targeting systems in an architecture that can be scaled up to support major commands and scaled down for installation on tactical platforms. Over and above what the current DCGS-N program will bring, a greater degree of automation will be required in the future to improve the tactical commander’s ability to task sensors and exploit their data. Naval strike groups spread more widely over the globe will find it necessary to rely more frequently on reach-back to help commanders cope with the flood of information available from current sensors and systems under development. The DCGS-N is the natural place in which to incorporate new capabilities and to facilitate reach-back.
Recommendation: The ASN(RDA), CNO, and CMC should initiate programs for improving tasking and exploitation that (1) implement a closed-loop ISR capability, (2) fuse multisource data, (3) optimize ISR platform and sensor use, (4) assist in target recognition, and (5) reside in DCGS-N with reach-back to other DCGS nodes.
The committee recommends that the Navy and Marine Corps develop a closed-loop tasking-exploitation-tasking ISR information system that learns from accumulating data over multiple observations, accruing and assessing evidence to determine if further tasking is needed. The system would give commanders a stronger degree of control over ISR collection, tools to assess ISR adequacy, and a fused, multisource ISR product that provides greater and more timely situational understanding. The system should apply automated upstream fusion of data from national assets to allow earlier association of emitting and non-emitting target signatures. It should optimize the positioning of ISR platforms and real-time sensor pointing to maximize the probability of target detection and identification. It should also feature automated image processing (highly detailed template matching) at optical, infrared, and SAR wavelengths to allow cueing of image analysts to make a final decision. Finally, the DCGS-N implementation should incorporate the above features but should also facilitate reach-back to well-equipped and well-staffed central facilities for tasking and exploitation support.
Finding: Current ISR capabilities of naval strike groups have a shortfall in the detection and tracking of quiet submarines in littoral waters. Navy and DOD programs in progress will improve these capabilities somewhat but will still leave significant gaps.
Antisubmarine warfare is moving toward greater reliance on distributed off-board sensors and vehicles owing to the limited search rates possible with organic sensors on manned platforms, particularly in adverse littoral environments against small, quiet diesel electric submarines. A network of distributed autonomous
underwater sensors has the advantages of large-area coverage, covert operation, and tolerance of individual node failures. Such a sensor network allows passive acoustic surveillance, distributed active surveillance, and multistatic operation with other collection assets.
Today’s distributed sensor arrays rely on passive acoustics and fiber-optic cable to send information back to operators for detection and classification. But reliance on cable makes it difficult to deploy the surveillance arrays rapidly and covertly on the ocean bottom. Furthermore, long cables connecting to shore are subject to trawling and other human-made measures that can limit their survivability. New methods of deployment and connectivity are needed.16
Recommendation: The Chief of Naval Research should conduct research and experimentation on (1) concepts for distributed, networked autonomous underwater sensors and (2) the concept of using the Long Range Mine Reconnaissance System (LMRS) unmanned undersea vehicle to deploy a network of autonomous underwater sensors and to serve as a gateway for their data.
The Office of Naval Research (ONR) should also conduct research and experimentation on other concepts for autonomous underwater sensor networks, exploring the trade-off between in-array processing and communicating data for humans to interpret, balancing the burden of performance between the array’s automated detection and classification capabilities and its communication link.
It may be possible to use the LMRS as the critical infrastructure element to deploy the sensors precisely and covertly, provide any routine maintenance, and connect the sensor network to the outside world. In the envisioned system, the sensors would be linked by optical fibers to each other and to the LMRS when it was in the vicinity. The LMRS would be able to connect to and disconnect from the array. In the absence of the LMRS, the array could collect and store data, or sleep, waiting for the LMRS to return.
|
16 |
The National Research Council, under the auspices of the Naval Studies Board, is currently conducting a study on Distributed Remote Sensing for Naval Undersea Warfare. See <http://webapp/cp/projectview.aspx?key=304>. |












































