
Recent Progress on GNSS Seismology
LIU JINGNAN, FANG RONGXIN, and SHI CHUANG
GNSS Research Center
Wuhan University
ABSTRACT
In this paper we introduce the background of seismology development and the opportunities and challenges it faces. To verify the agreement of precise point positioning (PPP) results and seismometer results, we set up a Global Navigation Satellite System (GNSS) seismologic testing platform. The experiments reflect that the results by the two methods have great agreement. With regard to the applications of GNSS seismology, we discuss the method of using GNSS to infer epicenters of earthquakes. Eventually the perspective of GNSS seismology is put forward.
INTRODUCTION
The GNSS has been widely used to study kinematic deformation. The accuracy of GNSS kinematic positioning has been significantly improved and can reach millimeter level (Elósegui et al., 2006). At present, the receiver technology and data storage capabilities of GNSS have been greatly improved with the sampling rate up to 50 Hz (Genrich and Bock, 2006). At the same time, high-rate GNSS tracking networks have been well established, with which recent earthquakes have been successfully observed (Emore et al., 2007; Irwan et al., 2004; Langbein and Bock, 2004).
When comparing GNSS with a seismometer, the differences are remarkable (Wang et al., 2007). The digital seismometer measures the accelerations or velocities of ground motions directly (Wang et al., 2011). By contrast, GNSS estimates the position of an antenna by recording range measurements between the
antenna and satellite. Moreover, the datum of GNSS positioning is satellite constellations, whereas the seismometer measures in a ground inertial reference frame.
A GNSS receiver has several advantages over a traditional seismometer. First, when the displacements of ground motions are required, GNSS can directly estimate them by range measurements and the results have no accumulated errors over time, but after integrating seismometer data to displacement, large drifts will occur. Secondly, a seismometer may be saturated in a large earthquake, in which case the instrument can not record the full amplitude of velocity or acceleration while GNSS will not be saturated in amplitude. Thirdly, a seismometer operates based on the theory of gravity, and a tilt of the instrument can bring about artificial horizontal acceleration, but a GNSS receiver will not be affected in this way. When a seismometer is saturated and unavailable to record large or nearby earthquakes, GNSS can be a feasible tool for earthquake studies.
When kinematic GNSS technology is used in seismology, it is referred to as GNSS seismology (Bock et al., 2011; Larson, 2009). In other words, using a high-rate GNSS technique to investigate the background, developing process, and explosion of earthquakes, and combining other data to determine relevant parameters can be called GNSS seismology. A high-rate GNSS receiver that is used as an instrument to capture co-seismic waves is called a GNSS seismometer.
The first experiment on GPS seismometers was reported in 1994 and was carried out by Hirahara et al. (1994) at the Disaster Prevention Research Institute of Kyoto University. In another experiment, Ge et al. (2000) fixed a GPS antenna, an accelerometer, and a velometer on a truck platform and demonstrated how GPS could recover the truck oscillation in both frequency and amplitude. They were the pioneers to reveal that GPS is able to measure large displacements with a high sampling rate.
After the 2002 Mw 7.9 Denali earthquake, Larson recovered the seismic waves with 1 Hz high-rate GPS data collected from California GPS tracking networks (Larson et al., 2003). Since then, a number of similar studies followed to use high-rate GPS technology to reconstruct waves caused by earthquakes (Bilich et al., 2008; Bock et al., 2000; Kouba, 2003; Shi et al., 2010) and to determine source parameters of earthquakes (Davis and Smalley, 2009; Ji et al., 2004; Miyazaki et al., 2004).
Kinematic high-rate GNSS positioning has been demonstrated successful for measuring seismic waves, in which relative mode is applied for GNSS data processing by assuming that one of the stations can be fixed to serve as a datum to compute absolute displacements (Bock and Prawirodirdjo, 2004; Larson et al., 2007). Obviously, a fixed datum may not be appropriate in the case of a large earthquake, and under that circumstance PPP instead of relative positioning is highly desirable. However, up to the present, there is no PPP result available to directly compare displacements from a seismometer and a GNSS receiver. The current studies of high-rate GNSS waveforms focus on the horizontal component and information on the vertical component has been ignored (Larson et al., 2007).
There are some challenges for GNSS seismology. How to improve the precision of GNSS positioning? How to realize real-time processing for huge network and ultra high-rate (20–50 Hz) GNSS data? How to explore methods of combining GNSS data and strong motion data for earthquake investigation?
For the above problems, we made some primary studies and tests as indicated in the following.
GNSS KINEMATIC POSITIONING AND TEST
Presently there are two approaches in GNSS kinematic positioning: relative positioning (RP) technique (Bock and Prawirodirdjo, 2004; Larson et al., 2007) and PPP technique (Geng et al., 2010; Kouba, 2003; Larson et al., 2003; Shi et al., 2010). In the former approach, at least one station must be fixed or tightly constrained to its known position, which will possibly experience displacement by the seismic motions. Therefore, the displacements estimated for the other stations are affected by the motions of the fixed station. In order to obtain displacements relative to a reference frame, stations not affected by the earthquake should be included as reference stations for data processing. As the position accuracy of relative positioning degrades along with the length of baselines, the inter-station distance is limited to hundreds of kilometers as in published studies (Ge et al., 2006).
In the PPP approach, where satellite clocks and orbits are fixed to pre-estimated precise parameters, for example, in the International GNSS Services (IGS) final products, the coordinates can be estimated station by station in the reference frame defined by the orbits and clocks. However, orbit and clock errors may affect the accuracy of estimated position. Hence we need to obtain high-precision orbit and clock data for positioning. In our study and test, the PPP approach was employed.
GNSS Seismometer Testing Platform
In order to compare the displacements of high-rate GNSS PPP results and seismometers results, we set up a testing platform (Figure 1). It is made of an aluminous board that is connected to the metal frame by eight springs. A GNSS antenna, seismometers recording acceleration, and an inertial measurement unit (IMU) are attached on the same board.
GNSS data were collected with a sampling rate of 50 Hz while seismometers and IMU simultaneously worked to record data of acceleration and attitude.
Data Processing Strategy
High-rate GNSS data were processed with the PANDA (position and navigation system data analyst) software, which was developed by the GNSS Research Center of Wuhan University as a multifunctional tool for GNSS research and
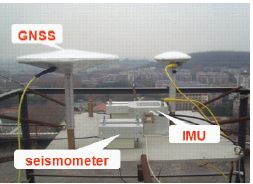
FIGURE 1 GNSS seismometer testing platform.
applications (Liu and Ge, 2003; Shi et al., 2006, 2008). Its performances in precise static and kinematic positioning were demonstrated by Ge et al. (2008) and Geng et al. (2009). In our test, PANDA software was used to compute displacements recorded by a GNSS receiver with the PPP technique. In order to correct for the tilting of the platform, IMU was used to obtain the attitude of the platform. After attitude correction, accelerometer data was integrated twice to obtain displacements.
Results and Analysis
Figure 2 shows a 50-second oscillation in the east component. The maximum displacement amplitude is about 1 cm. The amplitude of the maximum error is 5.6 mm. About 98 percent of the differences are less than 4 mm. The RMS error over the entire event is 1.8 mm.
APPLICATIONS OF GNSS SEISMOLOGY
Studies on Propagation Velocity and Earthquake Parameter Determination
Seismic waves take different times to reach various stations, and with the signals captured by GNSS we can determine the arrival times of seismic waves.
Figure 3 shows the Wenchuan earthquake seismic waveforms of the east component captured by GPS sites located at Shanghai, Wuhan, Xi’an, and Chongqing, respectively (from top to bottom).
With the time that an earthquake occurs, the times that seismic waves reach GNSS stations, and the distance between the stations and the epicenter, we can calculate the propagation speed of seismic waves. According to our calculation, the average speed of seismic wave propagation for the Wenchuan earthquake is 3.9 km/s.
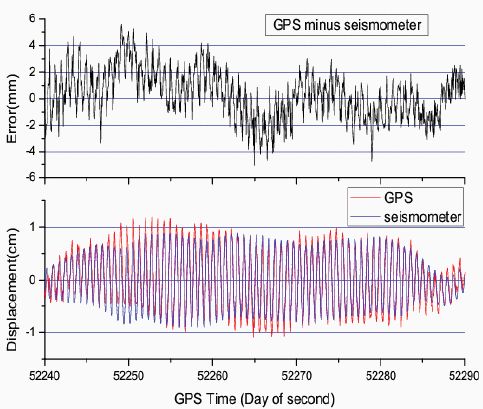
FIGURE 2 Comparison between GPS and seismometer (below), and their differences (upper).
Suppose the seismic waves propagate at equal speeds along all components, the position of the epicenter and the average speed of seismic wave propagation can be inferred with the known coordinates of the above four stations and the arrival times of seismic waves. Figure 4 describes the principle of epicenter determination with the coordinates of GNSS stations and the arrival times of seismic waves. Based on this method, GPS data of the Wenchuan earthquake are used to infer the epicenter. Compared with the result issued by the China Seismological Bureau, the inversion error is 12.5 km. The epicenter of the Chile earthquake on February 27, 2010, is also inferred with the inversion error of 27.4 km compared with the result released by the U.S. Geological Survey (USGS).
CONCLUSIONS
High-rate GNSS is going to be a new method to monitor earthquakes. With high-rate GNSS data, both seismic waveforms and the permanent offsets can be
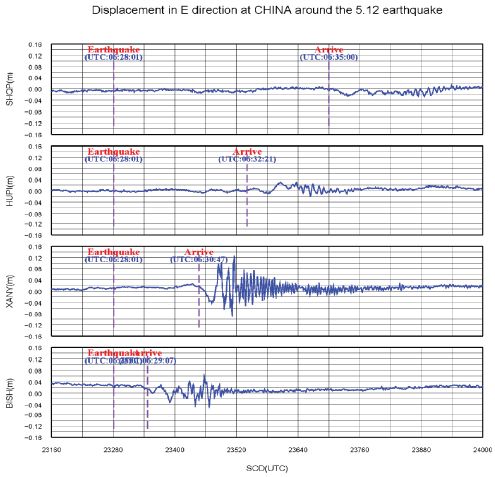
FIGURE 3 Seismic waveforms of Wenchuan earthquake in the east component captured by GPS sites located at Shanghai, Wuhan, Xi’an, and Chongqing respectively (from top to bottom).
obtained. Combining high-rate GNSS data and seismometer data, seismologic research on earthquake parameter determination and fault rupture modeling will be more scientific and reliable (Bock et al., 2011). Thus the high-rate GNSS positioning technique can be applied for real-time earthquake monitoring (Allen and Ziv, 2011), tsunami warning (Blewitt et al., 2006; Sobolev et al., 2007), and other engineering deformation monitoring.
There are still some problems with GNSS seismology. For instance, GNSS is not as sensitive as seismometers, GNSS is not applicable for small or far-field earthquakes currently, and the sampling rate is still insufficient to capture high-frequency seismic waves. These problems need to be further studied in our future research.

FIGURE 4 Epicenter determination with four GNSS stations.
REFERENCES
Allen, R.M., and A. Ziv. 2011. Application of real-time GPS to earthquake early warning. Geophysical Research Letters 38: L16310. doi: 10.1029/2011GL047947.
Bilich, A., J.F. Cassidy, and K.M. Larson. 2008. GPS seismology: application to the 2002 Mw 7.9 Denali Fault earthquake. Bulletin of the Seismological Society of America 98(2): 593–606.
Blewitt, G., C. Kreemer, W.C. Hammond, H.-P. Plag, S. Stein, and E. Okal. 2006. Rapid determination of earthquake magnitude using GPS for tsunami warning systems. Geophysical Research Letters 33: L11309. doi: 10. 1029/2006GL026145.
Bock, Y., and L. Prawirodirdjo. 2004. Detection of arbitrarily large dynamic ground motions with a dense high-rate GPS networks. Geophysical Research Letters 31: L06604. doi: 10.1029/2003GL019150.
Bock, Y., R.M. Nikolaidis, and P.J. De Jonge. 2000. Instantaneous geodetic positioning at medium distances with the Global Positioning System. Journal of Geophysical Research 105(B12): 28,223–28,253.
Bock, Y., D. Melgar, and B.W. Crowell. 2011. Real-time strong-motion broadband displacements from collocated GPS and accelerometers. Bulletin of the Seismological Society of America 106(6): 2904-2925. doi: 10.1785/0120110007.
Davis, J.P., and R. Smalley Jr. 2009. Love wave dispersion in central North America determined using absolute displacement seismograms from high-rate GPS. Journal of Geophysical Research 114: B11303. doi:10.1029/2009JB006288.
Elósegui, P., J.L. Davis, D. Oberlander, R. Baena, and G. Ekström. 2006. Accuracy of high-rate GPS for seismology. Geophysical Research Letters 33: L1 1308. doi: 10.1029/2006GL026065.
Emore, G.L., J.S. Haase, K. Choi, K.M. Larson, and A. Yamagiwa. 2007. Recovering seismic displacements through combined use of 1-Hz GPS and strong-motion accelerometers. Bulletin of the Seismological Society of America 97(2): 357–378.
Ge, L., S. Han, C. Rizos, Y. Ishikawa, M. Hoshiba, Y. Yoshida, M. Izawa, N. Hashimoto, and S. Himori. 2000. GPS seismometers with up to 20-Hz sampling rate. Earth, Planets and Space 52(10): 881–884.
Ge, M., G. Gendt, G. Dick, F.P Zhang, and M. Rothacher. 2006. A new data processing strategy for huge GNSS global networks. Journal of Geodesy 80(4): 199-203. doi: 10.1007/s00190-006-044-x.
Ge, M., G. Gendt, M. Rothacher, C. Shi, and J. Liu. 2008. Resolution of GPS carrier-phase ambiguities in Precise Point Positioning (PPP) with daily observations. Journal of Geodesy 82(7): 389–399.
Geng, J., F.N. Teferle, C. Shi, A.H. Dodson, and J. Liu. 2009. Ambiguity resolution in precise point positioning with hourly data. GPS Solutions 13(4): 263-270. doi: 10.1007/s10291-009-0119-2.
Geng, J., F.N. Teferle, X. Meng, and A.H. Dodson. 2010. Kinematic precise point positioning at remote marine platforms. GPS Solutions 14(4): 343–350.
Genrich, J.F., and Y Bock. 2006. Instantaneous geodetic positioning with 10–50 Hz GPS measurements: noise characteristics and implications for monitoring networks. Journal of Geophysical Research 111: B03403. doi 10.1029/2005JB003617.
Hirahara, K., et al. 1994. An Experiment for GPS Strain Seismometer. Pp. 67–76 in Japanese Symposium on GPS, December 15–16, Tokyo, Japan.
Irwan, M., F. Kimata, K. Hirahara, T. Sagiya, and A. Yamagiwa. 2004. Measuring ground deformations with 1-Hz GPS data: the 2003 Tokachi-oki earthquake (preliminary report). Earth, Planets and Space 56(3): 389–393.
Ji, C., K.M. Larson, Y Tan, K. Hudnut, and K. Choi. 2004. Slip history of the 2003 San Simeon Earthquake constrained by combining 1-Hz GPS, strong motion, and teleseismic data. Geophysical Research Letters 31(17): L17608. doi:10.1029/2004GL020448.
Kouba, J. 2003. Measuring seismic waves induced by large earthquakes with GPS. Studia Geophysica et Geodaetica 47(4):741–755. doi:10.1023/A:1026390618355.
Langbein, J., and Y. Bock. 2004. High-rate real-time GPS network at Parkfield: utility for detecting fault slip and seismic displacements. Geophysical Research Letters 31: L15S20. doi: 10.1029/2003GL019408.
Larson, K.M. 2009. GPS seismology. Journal of Geodesy 83: 227–233. doi: 10.1007/s00190-008-0233-x.
Larson, K.M., P. Bodin, and J. Gomberg. 2003. Using 1-Hz GPS data to measure deformations caused by the Denali Fault earthquake. Science 300(5624): 1421–1424.
Larson, K.M., A. Bilich, and P. Axelrad. 2007. Improving the precision of high-rate GPS. Journal of Geophysical Research 112: B05422. doi: 10.1029/2006JB004367.
Liu, J., and M. Ge. 2003. PANDA software and its preliminary result of positioning and orbit determination. Wuhan University Journal of Natural Science 8(2B): 603–609. doi: 10.1007/ BF02899825.
Miyazaki, S., K.M. Larson, K. Choi, K. Hikima, K. Koketsu, P. Bodin, J. Haase, G. Emore, and A. Yamagiwa. 2004. Modeling the rupture process of the 2003 September 25 Tokachi-Oki (Hokkaido) earthquake using 1-Hz GPS data. Geophysical Research Letters 31: L21603. doi: 10.1029/ 2004GL021457.
Shi, C., J. Geng, J. Liu, and M. Ge. 2006. Adjustment of LEO and GPS with PANDA in Precision Orbit Determination. In Proceedings of ION GNSS 2006, September 26–29, Fort Worth, Texas.
Shi, C., Q. Zhao, J. Geng, Y. Lou, M. Ge, and J. Liu. 2008. Recent Development of PANDA Software in GNSS Data Processing. In Proceedings of the Society of Photographic Instrumentation Engineers 7285, 72851S. doi: 10.1117/12.816261.
Shi, C., Y. Lou, H. Zhang, Q. Zhao, J. Geng, R. Wang, R. Fang, and J. Liu. 2010. Seismic deformation of the Mw 8.0 Wenchuan earthquake from high-rate GPS observations. Advances in Space Research 46(2): 228–235. doi:10.1016/j.asr.2010.03.006.
Sobolev, S.V., A.Y. Babeyko, R. Wang, A. Hoechner, and R. Galas. 2007. Tsunami early warning using GPS-shield arrays. Journal of Geophysical Research 112: B08415. doi: 10.1029/2006JB004640.
Wang, G., D.M. Boore, G. Tang, and X. Zhou. 2007. Comparisons of ground motions from colocated and closely spaced one-sample-per-second Global Positioning System and accelerograph recordings of the 2003 M6.5 San Simeon, California earthquake in the Parkfield Region. Bulletin of the Seismological Society of America 97(1B): 76–90. doi: 10.1785/0120060053.
Wang, R., B. Schurr, C. Milkereit, Z. Shao, and M. Jin. 2011. An improved automatic scheme for empirical baseline correction of digital strong-motion records. Bulletin of the Seismological Society of America 101(5): 2029–2044. doi: 10.1785/0120110039.
This page intentionally left blank.










